HaBuRo6
Nachbau Bluino Self Balancing Robot ESP32
Selbstbalancierende Roboter faszinieren mich. Im Jahr 2022 habe ich den HaBuRo3 gebaut und meine ersten
Erfahrungen gesammelt. Mittlerweile sind beide Motoren defekt. Plastikgetriebe, Getriebeschaden.
Der hier vorgestellte HaBuRo6 hat gegenüber seinem Vorgänger drei Veränderungen. Der Antrieb besteht aus
zwei Schrittmotoren. Eine Kaskadenregelung wurde eingebaut. Einsatz einer fertigen Software. Nachfolgend
als Framework bezeichnet. Die
Lizenzbedingungen erlauben eine private Nutzung.
In der Praxis gab es eine große Überraschung für mich! Ich musste, im Gegensatz zum HaBuRo3, nie einen
Regler Parameter ändern. In Verbindung mit einer Android-WiFi-Bluino-App funktionierte der Roboter
einwandfrei. Wenn der Roboter umkippt, was bei diesem Vehicle immer passieren kann, dann kann man ihn
über die Fernbedienung Aufrichten und er rastet sofort in die Balance ein. Klappt auch tadellos.
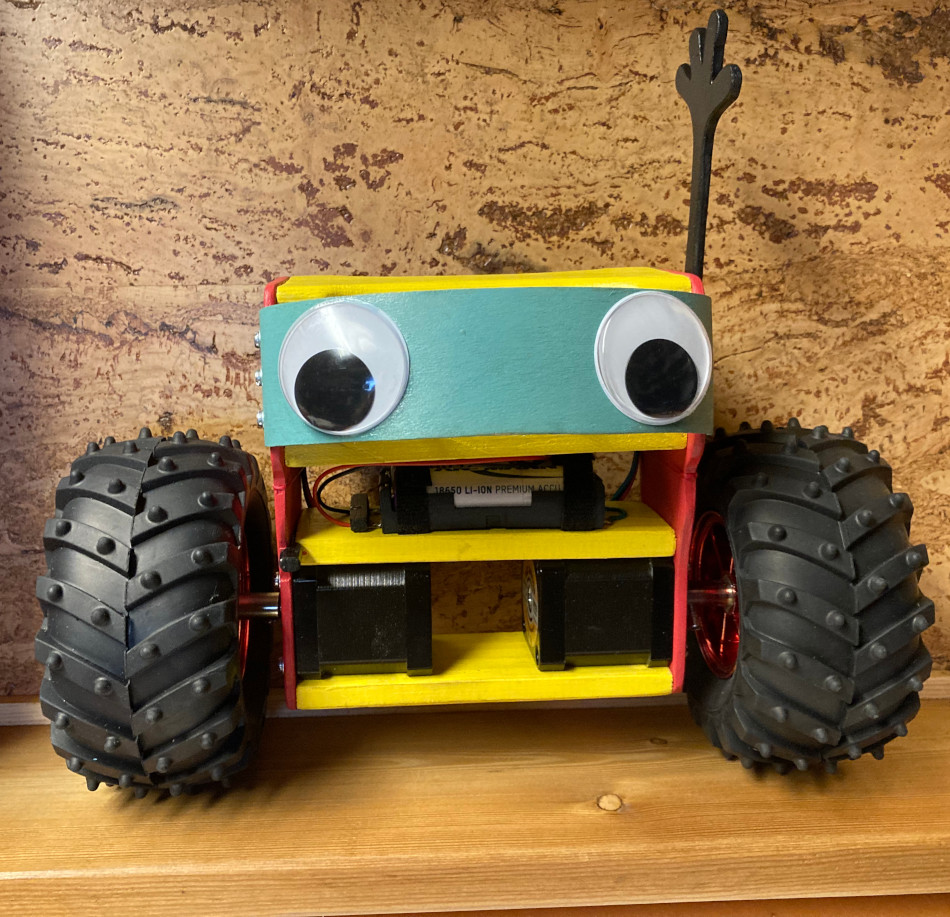
Der HaBuRo6 ist ein Nachbau aus einem Mix des legendären EVO2. Gebaut und programmiert vom Entwickler
Jose Julio, aus dem Jahr 2017. Und der ESP32 Selbstbalancierende Roboter von der Firma Bluino Electronics.
Anhand von vielen Videosequenzen und Bildern, die im Internet zur Ansicht stehen, habe ich mir einen
Bauplan geschaffen. Der HaBuRo6 ist aus Holz gebaut. Eine 40 Jahre alte Laubsäge entpuppte sich
zum wichtigsten Werkzeug.
Plötzlich wollen sie alle gleichzeitig damit Spielen. Wenn sich zwei streiten freut sich der Dritte.
Ich nicht, ich habe gleich zwei Stück gebaut. Der dicke HaBuRo6 und der schlanke, flinke Don Quijote.


Du möchtest auch so einen Roboter bauen? Klick die Menüs an. Es gibt ein Paar Dinge die man beachten muss:
1. Dimension der Stoßstangen, sie haben Einfluss auf den Aufrichtungsprozess des Roboters. 2. Das Framework
kompilieren. 3. Bestückung der Steuerplatine.
HaBuRo6, technische Daten:
Länge ohne Räder: 140 Millimeter, mit Räder: 285 Millimeter
Höhe ohne Räder: 145 Millimeter, mit Räder: 180 Millimeter
Breite: 80 Millimeter
Gewicht: 1543 Gramm
Spannung: 7,2 Volt
Strom: 1,1A bis 3,2 Ampere
Laufzeit: 90 Minuten
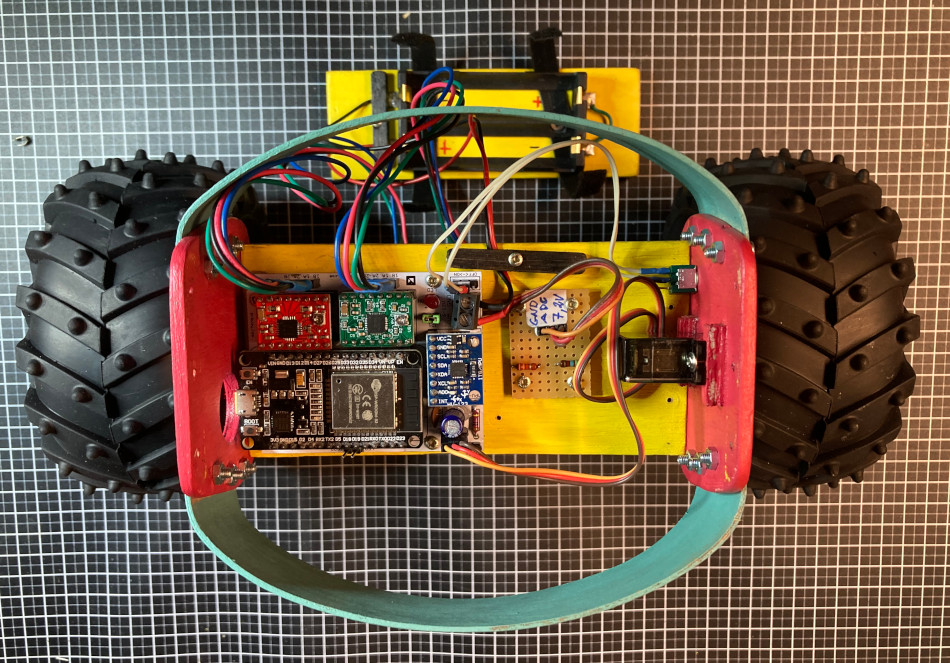
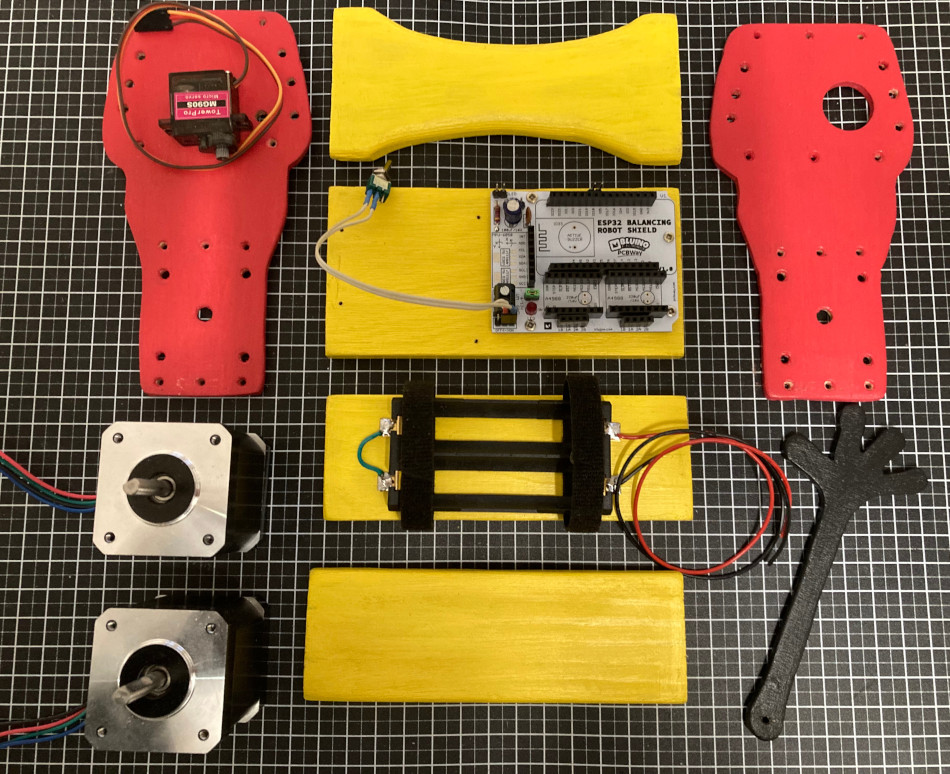
NEMA17 Schrittmotore: 2x StepperOnline, 17HS15-1504S-X1, 1,8°/Stepps, 1.5A, 45Ncm
Motortreiber: 2x A4988
Servo: MG90S-Tower-Pro
Räder: 2x Pololu Dagu Wild Thumper 120x60mm
Rad-Adapter: Pololu Universal Aluminium Mounting Hub for 5mm Shaft
Akku: 2x Ansmann Li-Ion Akku 18650 3500mA
Steuerplatine: PCBWay
Framework: GitHub, Bluino.com
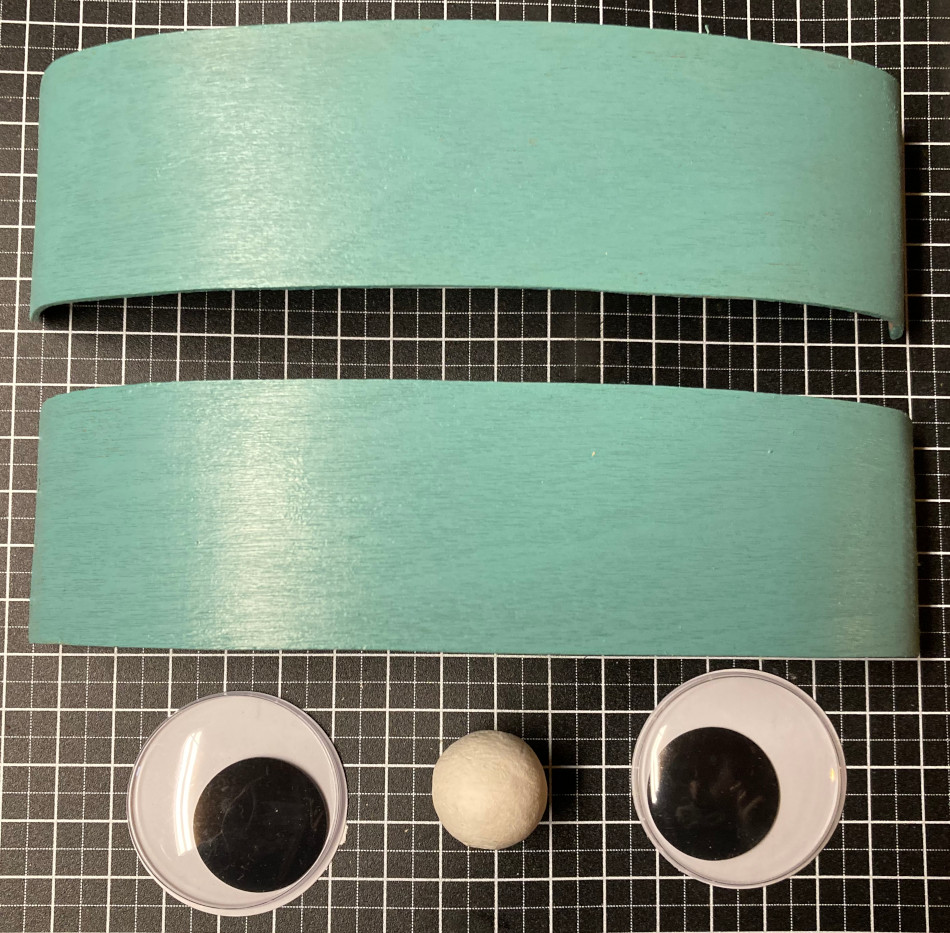
Wackelaugen: TEDi
ESP32, MPU6050
Damit die Kosten für ein neues Projekt im Rahmen bleiben baue ich aus einigen älteren Exponaten die
mechanischen und elektrischen Komponenten aus. Das gilt besonders für Motoren,
Mikrocontroller, Räder, Sensoren und Akkus!
HaBuRo6 © 2025 Hans Busche