HaBuRo6 Holz
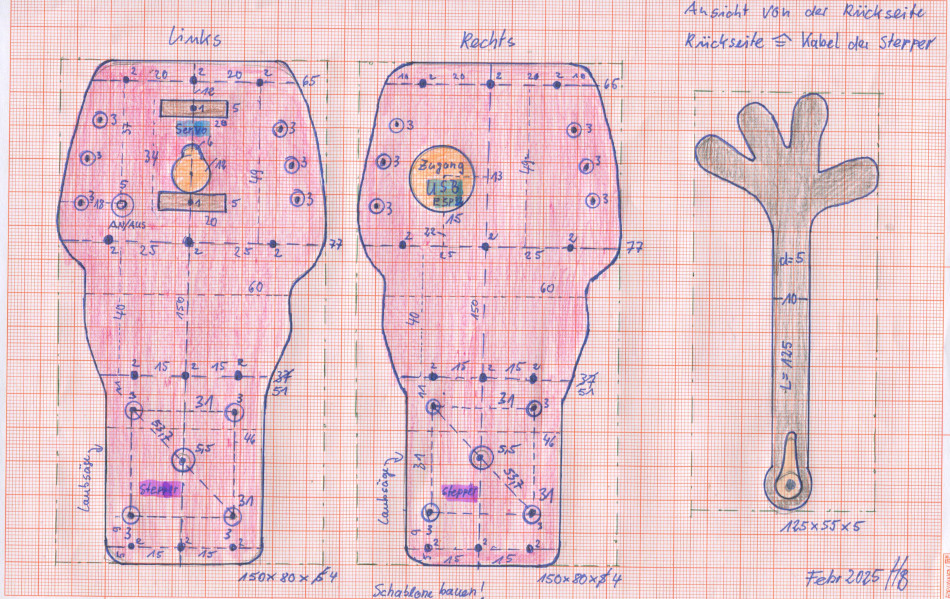
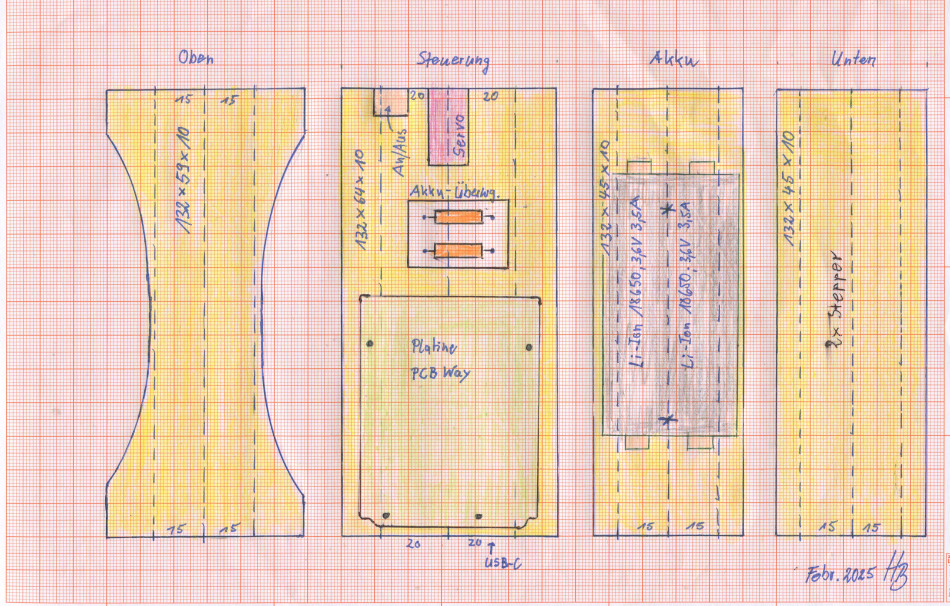
Auf ein 10mm dickes Holzbrett platziert man zwei Schrittmotoren. Drüber ein weiteres 10mm dickes Holzbrett für die, mit
zwei Akkus bestückte, Akkuwanne. Es folgt ein kleiner Luftspalt. Dann erneut ein 10mm dickes Holzbrett für die
Steuerplatine. Der Abstand zwischen Holzbrett Steuerplatine und das vierte 10mm dicke Holzbrett als Oberteil wird
durch das Servo und den Aus- Einschalter bestimmt. Schon hat man die Höhe und Länge des Roboters. Die Breite bestimmt
letztendlich die Steuerplatine plus einen Angstzuschlag.
Die Motorwelle mit 5mm Durchmesser der zwei Schrittmotoren bestimmen die Mitte der gesamten Konstruktion. Alle Komponenten,
besonders die zwei Akkus müssen diese Mitte berücksichtigen. Das Gesamtgewicht des Roboters beträgt 1500 Gramm. Wir müssen
erreichen, dass die Aufrechte Position (0° Pitch) mit dem Schwerpunkt deckungsgleich ist.
Über den Bluino- und oder EVO2 Roboter gibt es auf YouTube Videos. Diese schaut man sich genau an, um eine Vorstellung
zu bekommen. Man braucht kein Muster und schon gar nicht eine KI-Unterstützung.
Für die zwei Seitenwangen muss man mit einem Kurvenlineal etwas experimentieren. Danach baut man eine Schablone aus Pappe.
Du kannst auch aus Pappe ein kleines Modell bauen bevor du dich mit der Bearbeitung der Holzteile beschäftigst.
Das wichtigste Werkzeug ist hier die Laubsäge.
Modellbauer, die Schiffe und Flugzeuge aus Holz basteln haben für dieses Holzmaterial einen Fachbegriff: Flugzeugsperrholz!
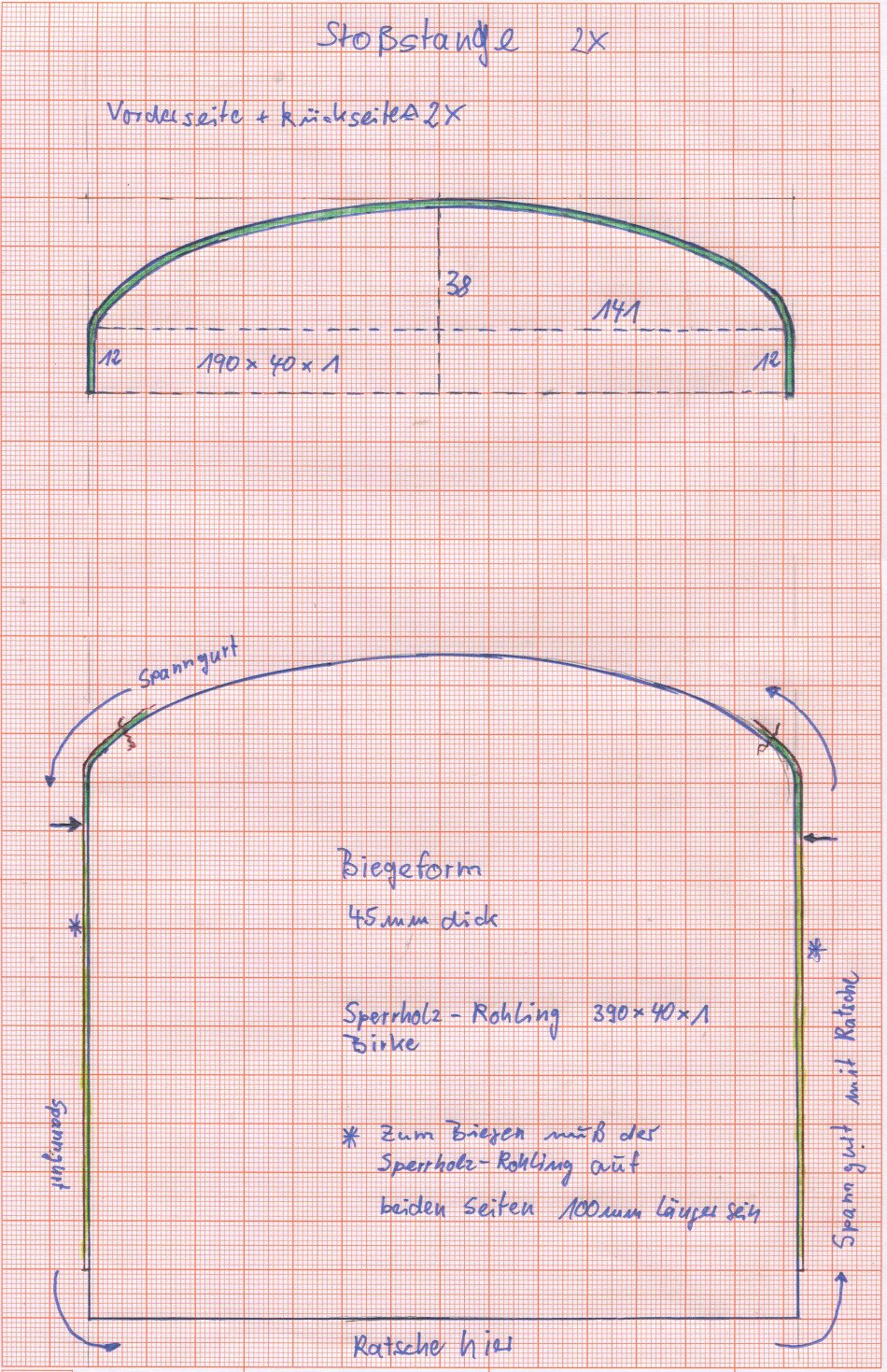
Im Netz gibt es viele und auch sehr gute Lieferanten. Zwei Holzteile müssen gebogen werden. Dafür eignet sich 1,0mm
Birkensperrholz mehrfach verleimt.
Jedes zu bearbeitende Stück Holz muss mit Abklebeband beidseitig abgeklebt werden. Ich benutze nur 3M Klebeband, erhältlich
bei TEDi, 1/3 des Baumarktpreises.
Im Hintergrund spielt Musik, Albatros von Karat, auf der Werkbank liegen die Holzrohlinge mit Japansäge und Laubsäge.
Rechts daneben eine Flasche B… Oh! Entschuldigung ich habs verstanden! Ein Flasche Orangensaft mit Deckel (Staub).
Auf gehts!

Alle fertigen Holzteile, außer die Seiten, wo die Seitenwangen angeschraubt werden, mit 80er Schleifpapier schleifen.
Auch die Kanten rundschmirgeln. Feinschliff mit 180er Schleifpapier. Es hilft nichts! Einige Male musst du das Gestell
zusammenschrauben, prüfen, nachschleifen usw.
Wasserlösliche und ungiftige Spielzeugfarbe benutzen. Zum Beispiel Super
Nova Acryl Lack. Zwei Anstriche unverdünnt auftragen.

Birkensperrholz biegen: Einwickeln in ein Tuch und ins Waschbecken legen. Mit gekochtem Wasser übergießen,
bis alles bedeckt ist. Verweilzeit 45 bis 60 Minuten. Tuch entfernen Birkensperrholz leicht abwischen
und dann über die Form mit Spanngurt fixieren. Seitenteile mit geradem Holz und Schraubzwingen arretieren.
Mindestens 24 Stunden ruhen lassen.
Handskizzen.
Achtung! Die gebogenen Stoßdämpfer aus Birkensperrholz haben
für den automatischen Aufrichtprozess des Roboters, wenn er auf dem Boden liegt, eine wichtige
Funktion! Der Roboter liegt nicht waagerecht auf dem Boden, sondern mit einem Winkel von
zirka 20°, also schräg nach oben. Wenn der Aufrichtprozess, ausgelöst durch die Servo-Taste,
nicht funktioniert, dann musst du das hier zuerst überprüfen. Bei mir war das der Fall und
ich habe das nachträglich mit Moosgummi ausgeglichen.
HaBuRo6 Holz © 2025 Hans Busche