WiFi-App für Android
Starte Visual Studio Code, lade das Projekt und aktivieren die Konsole für den Print-Monitor.
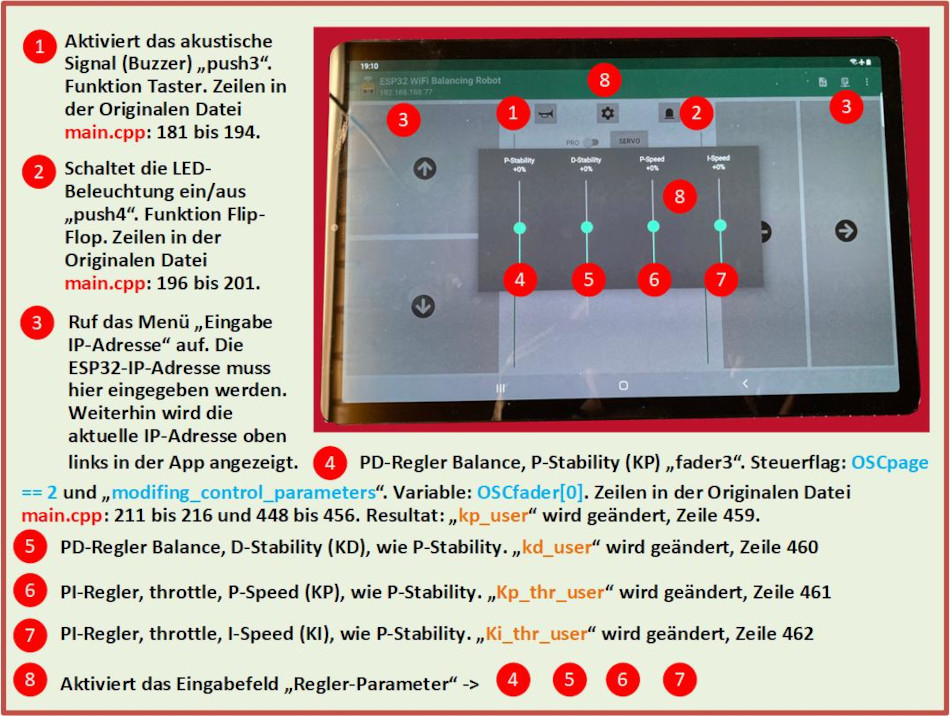
Beim Hochfahren der Software sendet der Roboter die WiFi-IP-Adresse. Bei mir ist das die
IP 192.168.188.78. Diese Adresse musst du in der Bluino-App einmalig eintragen.
Siehe Bild 2, Position 3. Jetzt steht der Kommunikation zwischen Roboter und der Android-App
nichts mehr im Weg.
Eine Kommunikationsunterbrechung wird explizit nicht angezeigt.
Ein Beispiel: Absolviert der Roboter eine Vorwärtsbewegung und es gibt eine
Verbindungsunterbrechung, dann rennt der Roboter ins Niemandsland.
Über die Bluino-App
kann man die Parameter für den PD/PI-Regler einstellen. Jedoch musste ich hier noch nie etwas
verändern. Im Gegensatz zum HaBuRo3, dort habe ich stundenlang rumgekaspert bis letztendlich
ein Getriebeschaden am Motor auftrat.
Derzeit kann ich nur in der Wohnung rumkurven. Eigentlich möchte ich viel lieber draußen in
der Natur diesen Spaß genießen. Mit anderen Worten! Ich möchte auf Bluetooth umstellen und habe
diese Änderung geplant!
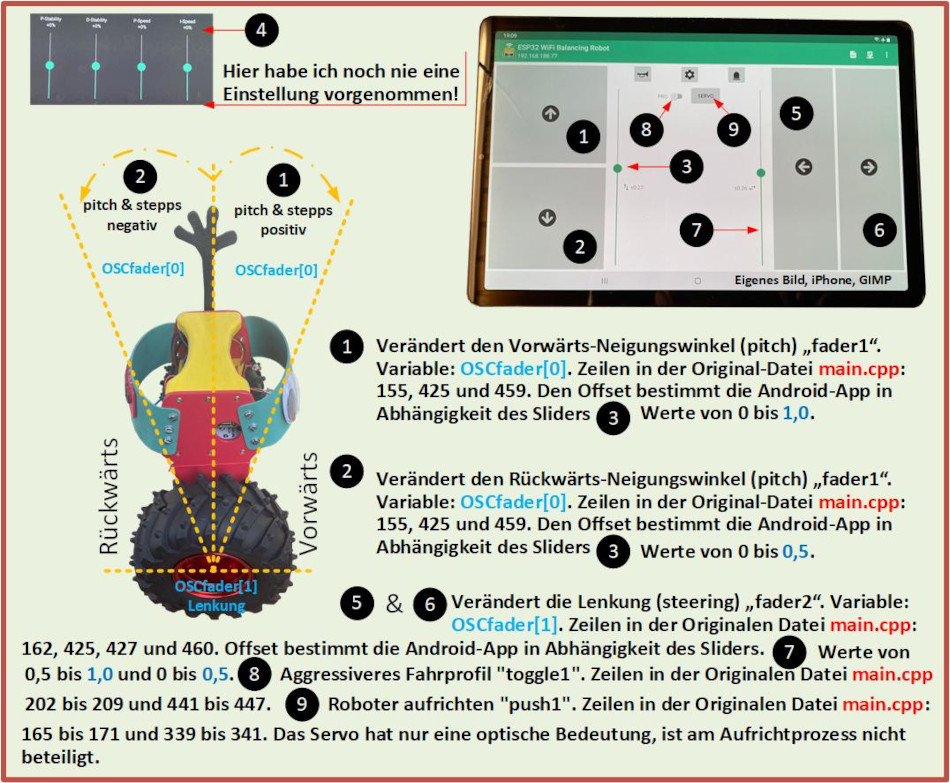
Vorwärts, rückwärts, links und rechts sind die vier Kommandos für die Steuerung des Roboters.
Meine Enkelinnen kommen mit drei Befehle aus. Da sich der Roboter bei einem Kurven-Kommando
elegant um die eigene Achse dreht benutzen Sie nur eine Taste. Das mache ich jetzt auch.
Bedeutet, man kann auch von einer siebenjährigen lernen!
WiFi-App für Android © 2025 Hans Busche