HaBuRoArm
Ein Roboter Arm aus Holz.
Der HaBuRoArm (Roboterarm) ist ein Herbst- Winterprojekt 2021.
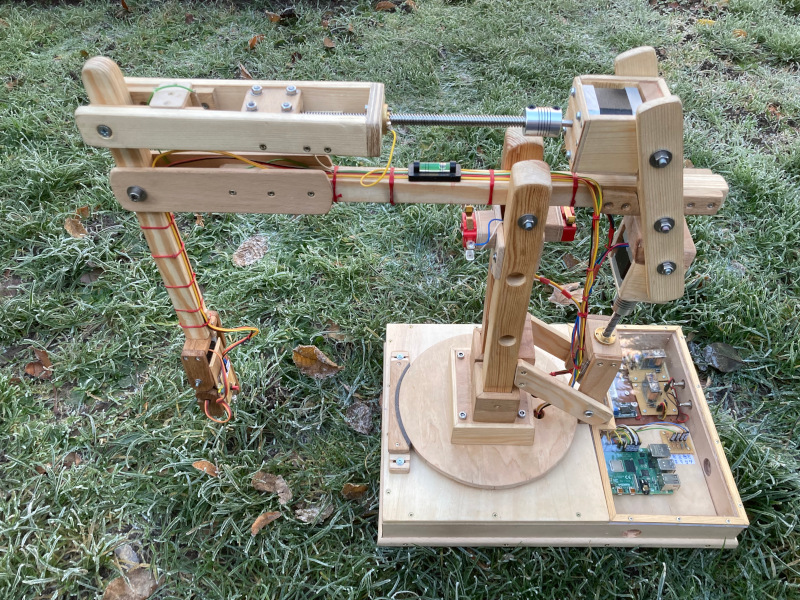
Er ist aus Holz gebaut. Nach dem Prinzip Baukastensystem. Nichts am Holz ist verleimt, alles lässt sich in
Einzelteile zerlegen. Für maßhaltige Konstruktionen wurde Parkett-Eichenlamellen eingesetzt und der Rest besteht
aus Fichtenholz.
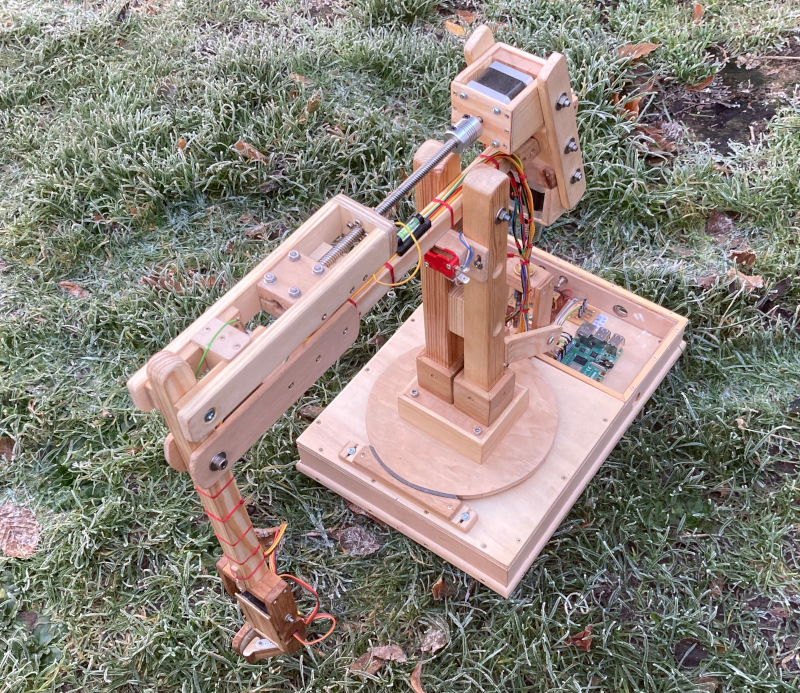
Gewindespindeln sorgen für das Heben und Senken des Roboterarmes.
Der Drehteller (Drehgelenk) wird direkt vom Schrittmotor angesteuert. Der Greifer besteht aus zwei Servos.
Ein Raspberry Pi 3 übernimmt die Steuerung. Die Software (Python Skript) besteht aus zwei Teile.
Erstens: Editor, zum Erstellen von CSV-Fahrprofilen.
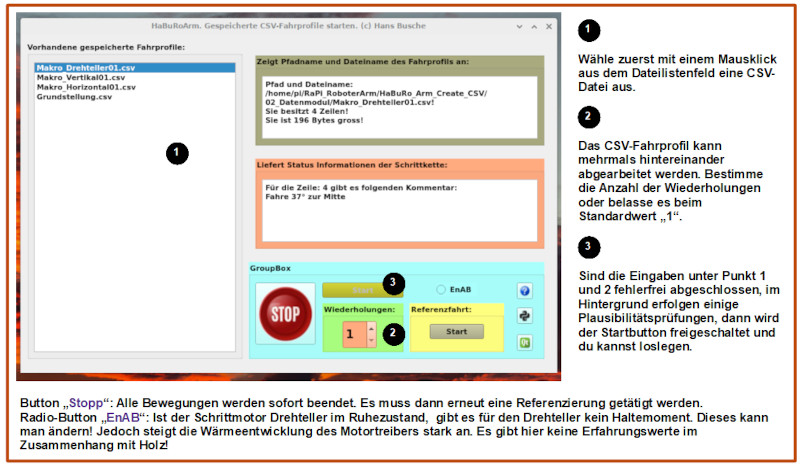
Zweitens: Gespeichertes CSV-Fahrprofil (Datei) abarbeiten.
Bevor man mit dem
CSV-Editor
Fahrprofile erstellt, müssen alle drei Schrittmotoren einen Referenzlauf absolvieren.
Die zwei Gewindespindeln (x- und z-Achse) sind mit
Endlagetaster
ausgerüstet. Eine Gabellichtschranke überwacht den
Drehteller (y-Achse). Diese Sensoren spielen bei dem Referenzieren der Schrittmotoren eine tragende Rolle.
Bei kritischer Betrachtung stellt man fest, dass die Gewindespindeln doch ziemlich rumeiern.
Auch die Geräuschkulisse ist gewöhnungsbedürftig. Das Rumeiern beeinträchtigt nicht die Funktion!
Wichtig ist letztendlich, dass immer die xyz-Koordinaten punktgenau angefahren werden.
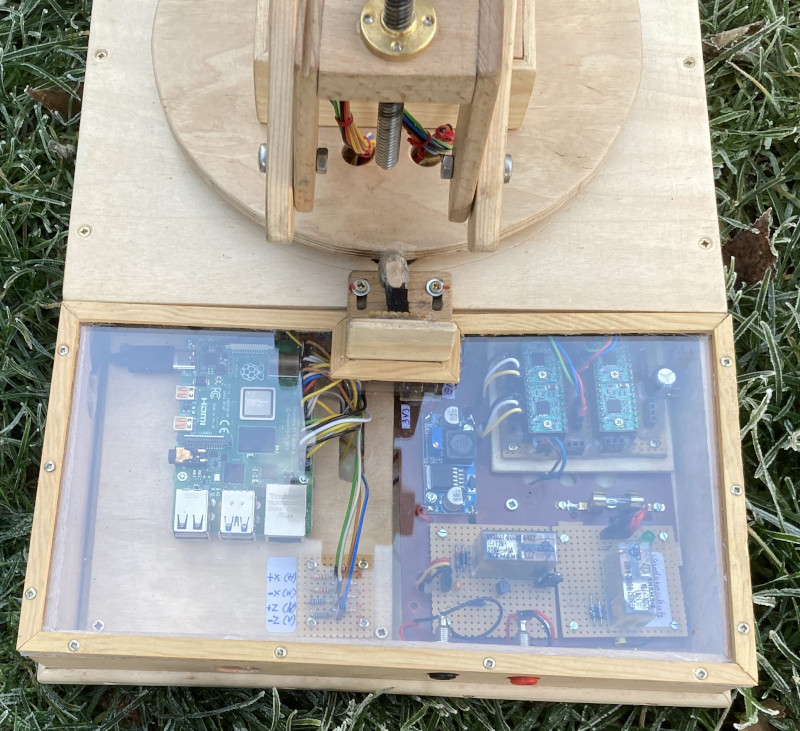
Wie bereits weiter oben in diesem Kapitel erläutert ist der Roboter zerlegbar. Auch die Steuerungskomponenten
sind mit wenigen Handgriffen ausgebaut. Der Kabelbaum ist mit einpoligen Steckbuchsen ausgeführt. Keine Frage!
Wenn ich mich mit diesem Projekt sattgefummelt habe verwende ich den Raspberry Pi in anderen Projekten.
Mittlerweile existieren drei umfangreiche CSV-Fahrprofile: 1. Legosteine von A nach B und zurück.
2. Drei Legosteine übereinander stapeln und 3. ein Turm aus fünf M8-Stahlmuttern.
Eine Kugelbahn aus Holz,
wobei der Roboterarm die Speisung der Kugeln übernimmt, wäre doch nicht schlecht! Oder?