HaBuRoArm, der Greifer

Die Belastung der Servos ist schon erheblich und bei der Auswahl sollte man auf ein Metallgetriebe
achten. Holzmaterial: Eiche Hochkant Lamelle (10x8x160).
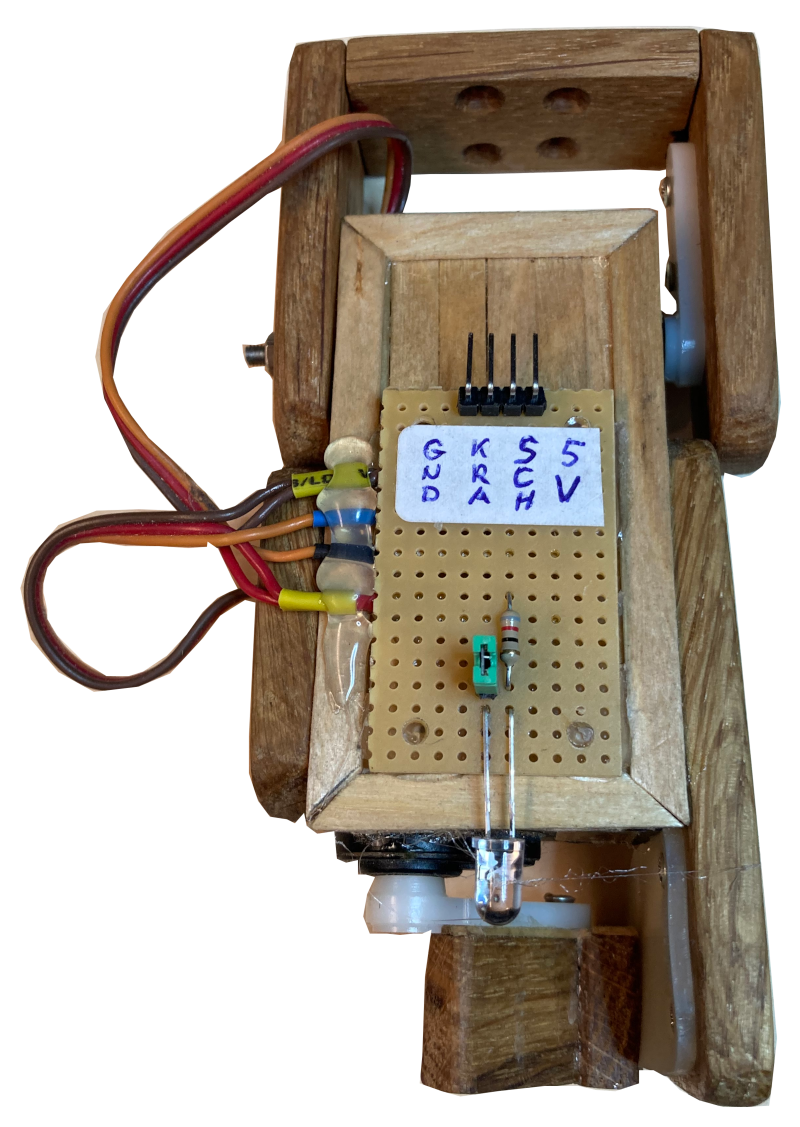
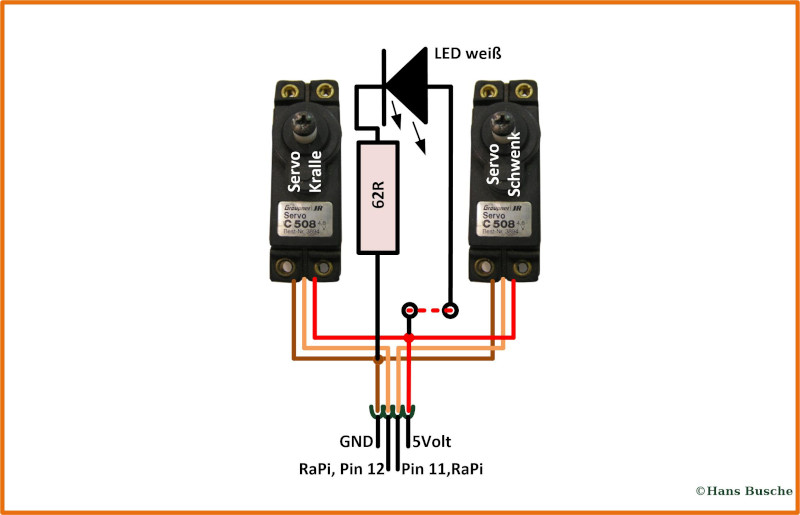
So sieht er aus! Der Greifer. Zur Reduzierung der elektrischen Leitungen habe ich einen Adapter eingebaut.
Ja! Und dann war da auch noch Platz für eine Leuchtdiode.
Hinweis zur Steuerung: Die 5 Volt Spannungsversorgung direkt vom Step Down Converter abnehmen,
nicht vom Raspberry Pi Pin.
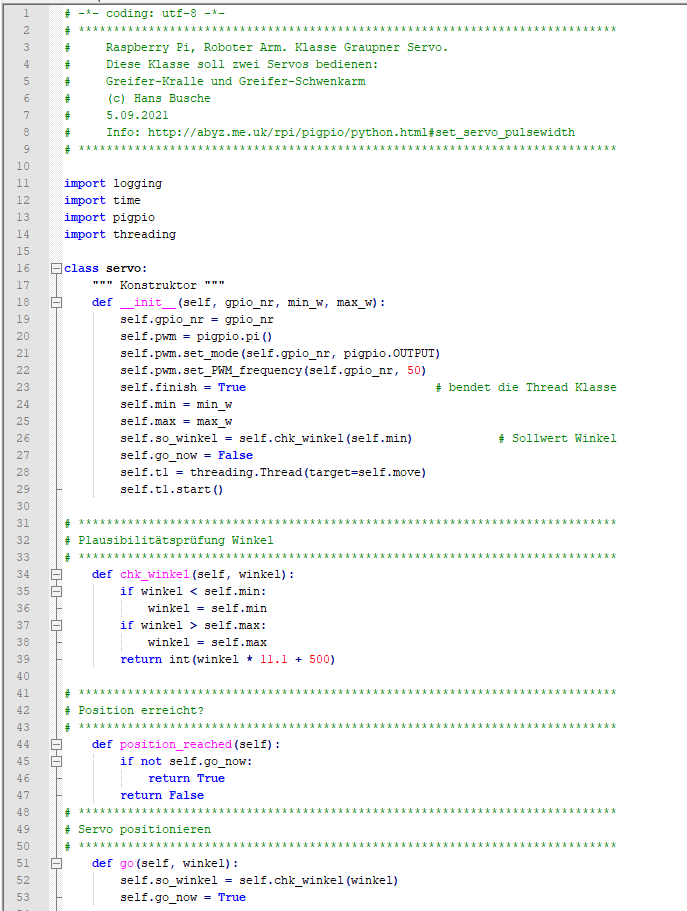
Software: Eine selbstgestrickte Pulsweitenmodulation führt
hier nicht zum Ziel. Die Servos fangen an zu zuckeln. Alle Sensoren und Aktoren benötigen Parallelprogrammierung (Threads)
dadurch wird die Zeitgenauigkeit der Pulsweitenmodulation beeinträchtigt. Abhilfe schafft hier die Bibliothek
pigpio.
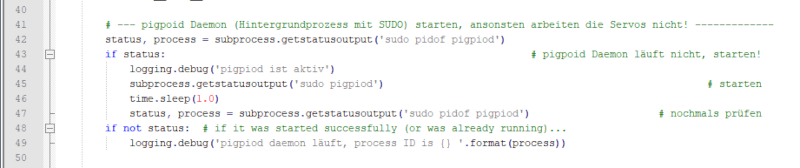
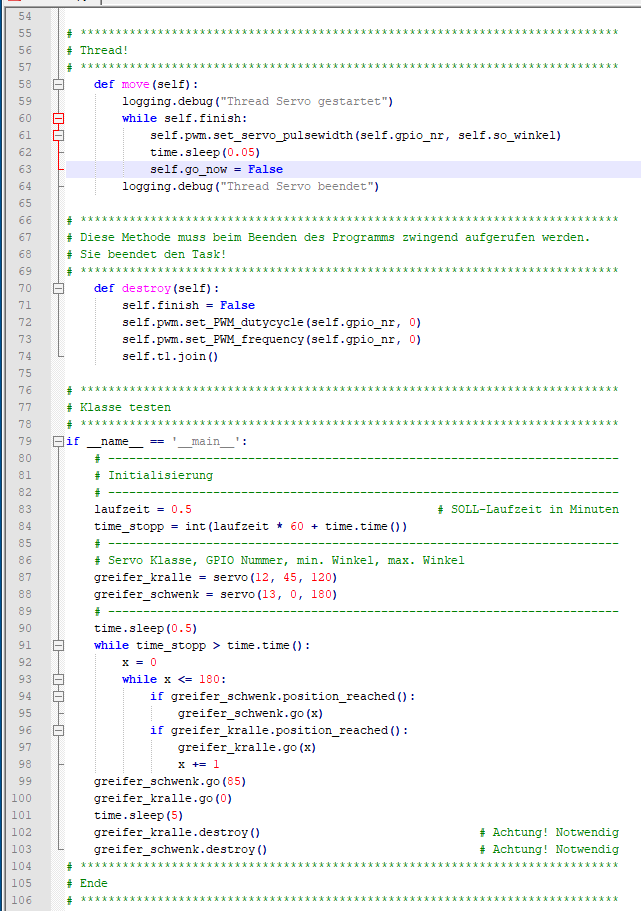
Pigpio muss im Hintergrund laufen. Im Initialisierungsteil des main-Python Skript geschieht das ab Zeile 40.
Alle weitern Objekte müssen danach instanziiert werden.