HaBuRoArm. In Abhängigkeit einer CSV-Datei Bewegungsprofile erstellen.
Das Erstellen von Fahrprofilen (Bewegungsabläufe) erfordert Zeit und Geduld. Nachfolgend wirst du sehen,
dass Werkzeuge und Hilfsmittel dafür zu Verfügung gestellt werden. Jedoch muss man oft nacharbeiten,
da nach etlichen Testläufen immer noch Optimierungen erforderlich sind. Bevor du hier startest, solltest du noch eine
Genauigkeitsprüfung durchführen.
Der CSV-Editor!
Anleitung!
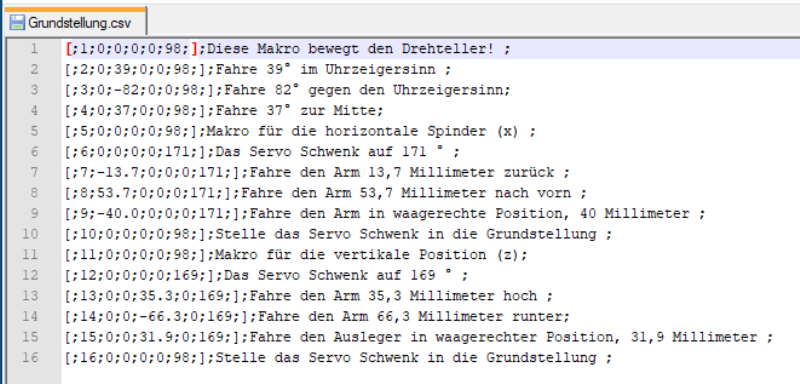
Das obige Bild zeigt ein Beispiel einer CSV-Datei. Dieses Beispiel war auch für mich der erste Gehversuch
mit dem obigen CSV-Editor. Zu diesem Zeitpunkt war der horizontale- und vertikale Arm noch nicht mit einer
Wasserwaagen-Libelle ausgerüstet. Quick and dirty! Kann man sagen. Zuerst habe ich drei Makros erstellt.
Zeile 1 bis 4, Makro Drehteller. Zeile 5 bis 10, Makro horizontale Bewegung. Zeile 11 bis 16, Makro vertikale
Bewegung. Danach wurden diese Makros zu einer Datei zusammengebaut.
Monate später habe ich dann das erste
anschaubare Bewegungsprofil erstellt, ein Turm aus M8-Gewindemuttern (m8_tower.csv).
Bevor man ein Fahrprofil erstellt muss man zwei wichtige Entscheidungen treffen.
1) soll der Bewegungsablauf hintereinander (seriell) ablaufen oder
2) will man Bewegungen parallel ausführen. Mit anderen Worten x-Achse zusammen mit der y-Achse usw.
Hier muss man einfach einiges ausprobieren.
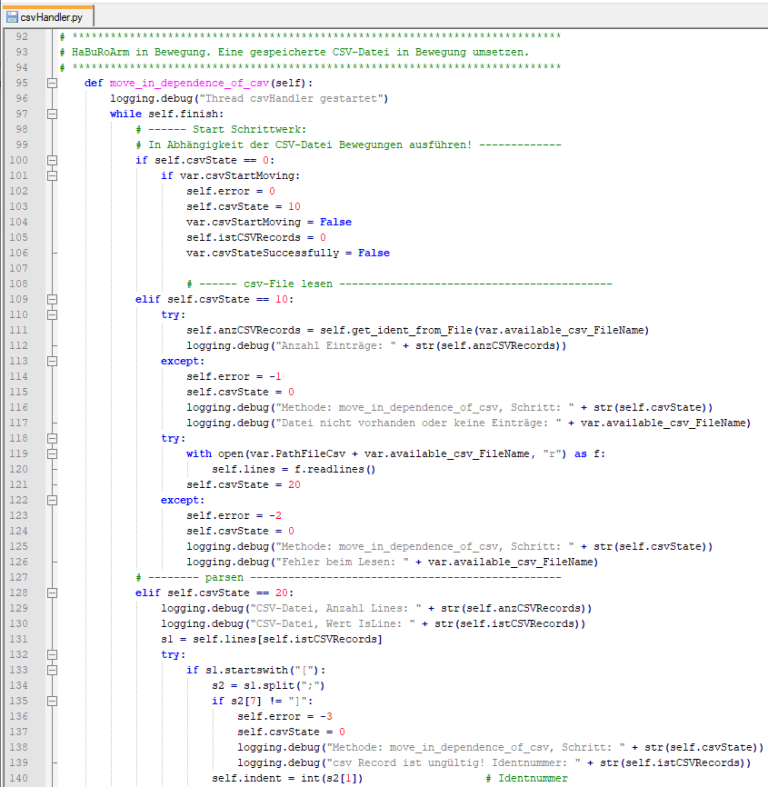
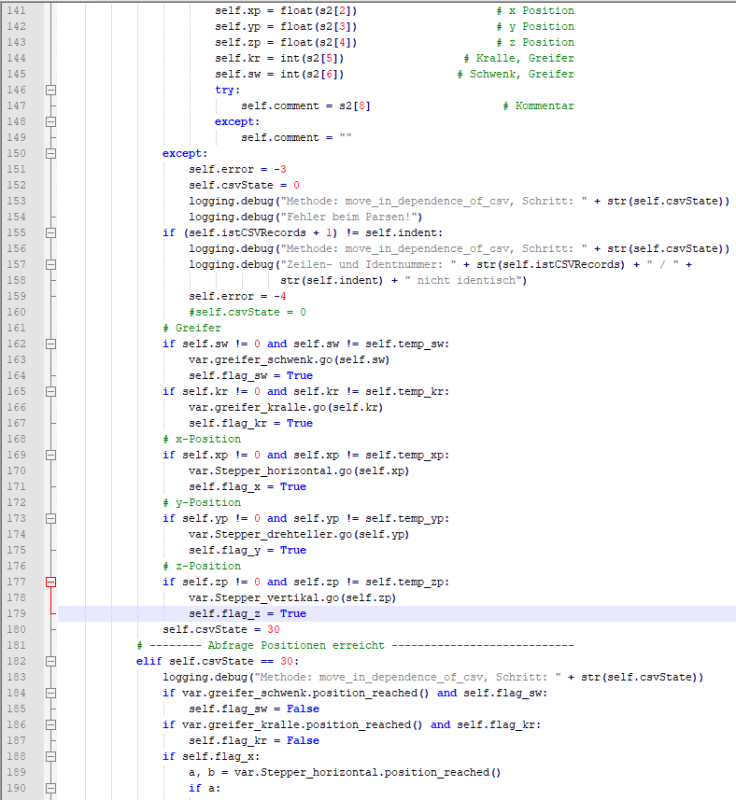
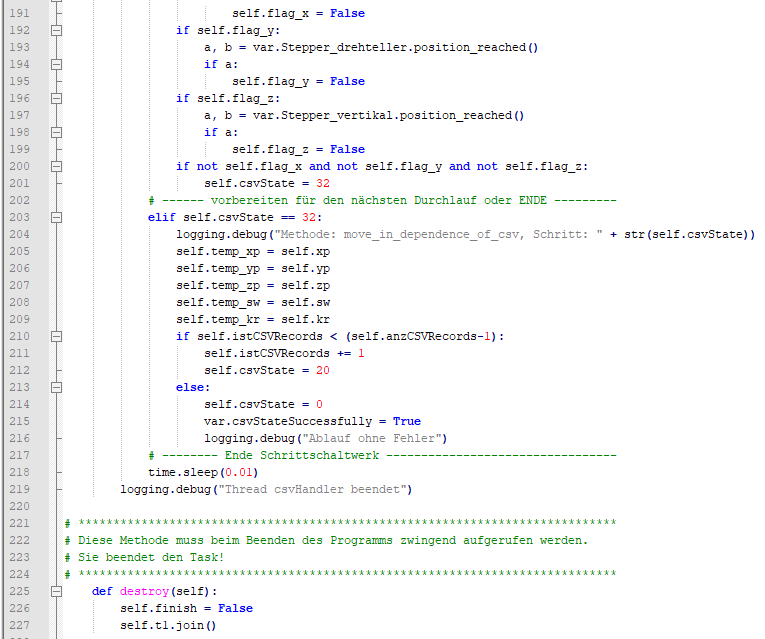
Aus Sicht der Python-Software wird eine CSV-Datei in einer eigenständigen Task ausgeführt. Ein Schrittschaltwerk
(state machine) liest die Datei Zeile für Zeile. Jede einzelne Zeile wird einem Parser übergeben und dieser Parser
leitet die selektierten Koordinaten an die Schrittmotor-Klasse weiter.
Wichtig sind folgende Bedingungen:
Eine Bewegung wird nur ausgeführt, wenn der Wert ungleich Null ist und der Wert sich vom vorherigen Wert unterscheidet.
Siehe Zeile 162 bis 180 und Zeile 205 bis 209.
Die Software des Roboters besteht aus zwei eigenständige Applikationen: 1. Der CSV-Editor. 2. Fahrprofile starten.