HaBuRo3
Ein selbstbalancierender Roboter
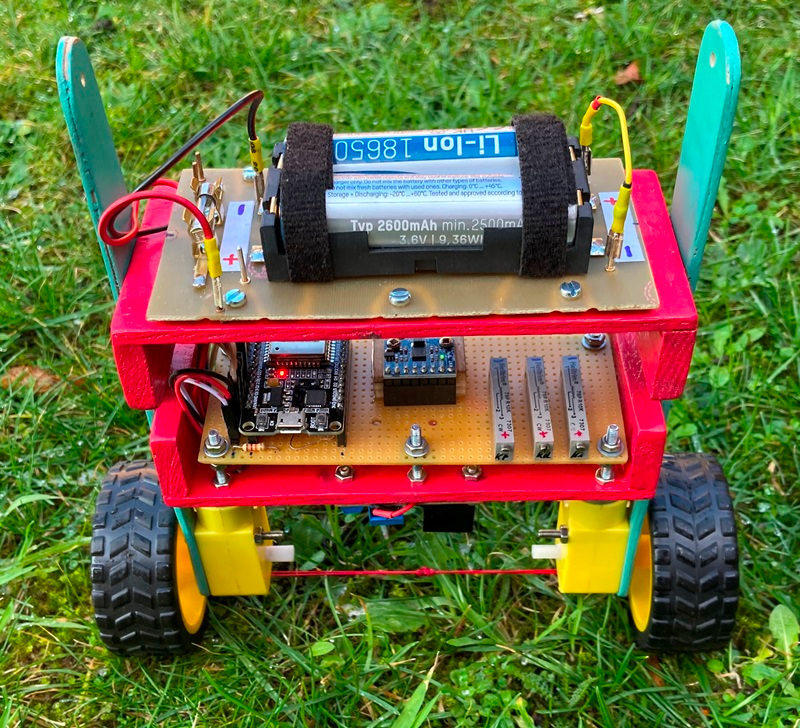
Der HaBuRo3 ist ein selbstbalancierender Roboter. Um sein Gleichgewicht zu halten,
wirken zwei Motoren permanent der Kippneigung entgegen. Dieses Verhalten übernimmt
ein Proportional-Integral-Differenzial (PID) Regler.
Ein Beschleunigungssensor und
Gyroskop (MPU6050) misst in einem Zeitfenster von Millisekunden den Neigungswinkel
(pitch) und übergibt diesen Wert den Regler als Istwert.
Der Sollwert des Reglers
ist in diesem Fall die Senkrechte Position in Verbindung mit dem Schwerpunkt des
Roboters. Der Regler wiederum generiert daraus eine Stellgröße für die Motoren.
Sind die Parameter des Reglers (Kp, Ki, Kd) optimal eingestellt, dann wird der
HaBuRo3 souverän in seiner senkrechten Position gehalten.
Verändert man den Sollwert
(Setpoint) wenige Winkelgrade nach vorn, so fährt der Roboter vorwärts. Verringert
man den Sollwert um wenige Winkelgrade fährt er rückwärts. Verändert man die Drehzahl
eines Motors gegenüber dem anderen Motor so leitet man eine Kurvenfahrt ein.
Das klingt
so eigentlich recht einfach! Aber der Teufel steckt im Detail. Ich lade dich hiermit ein,
zum Durchklicken der einzelnen Menüs.
Wenn du alle Bauteile, einschließlich Holz und Akku,
kaufen musst, dann sind das Materialkosten von 64 Euro bezogen auf
das Datum: 5. März 2023. Ohne Fernsteuerung. Wobei ein Akku teurer ist als der Mikrocontroller ESP32.
Na dann mal Prost!
Anfangs ist es recht erfreulich, wenn der HaBuRo3 in die Senkrechte Position einrastet und dort
wie eine Deutsche Eiche verweilt. Jedoch es wird sehr schnell langweilig.
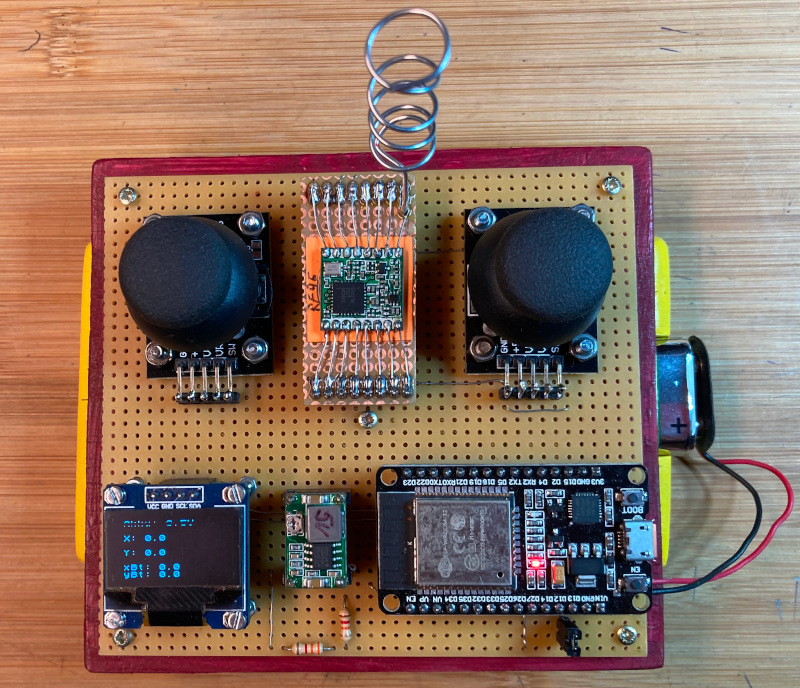
Eine
Fernsteuerung muss her. Es gibt zwei Möglichkeiten, Kommandos abzusetzen. Bluetooth oder
868MHz Radio (RF95). Die Fernsteuerung benutze ich auch bei anderen HaBuRo-Projekten.
Der Roboter HaBuRo3 kann nur Bluetooth verarbeiten. Stell dir vor, du sitzt im Wintergarten,
neben dir ein gutes Getränk, und der Roboter dreht auf dem grünen Rasen seine Pirouette.
Donnerwetter! Manchmal fällt er auf die Schnauze. Ja! Dann musst du raus!