HaBuRo3 Fernbedienung
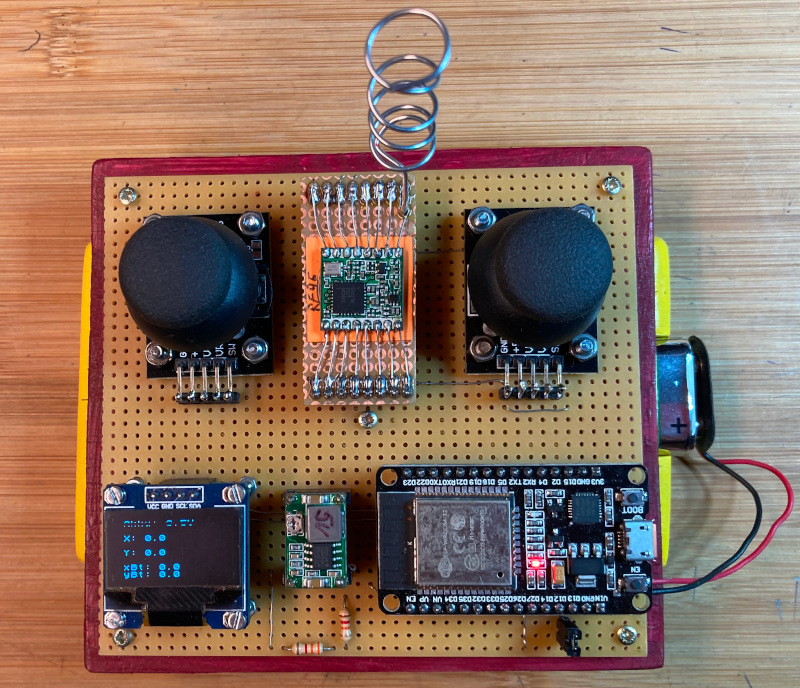
Jumper gebrückt entspricht RF95, offen entspricht Bluetooth. Joystick links
für Kurvenfahrt. Joystick rechts für vorwärts oder rückwärts.
Energieversorgung 9 Volt Blockbatterie. Schau dir vorher die Spezifikation
der Joysticks an,
bevor du dich mit dem nachfolgenden Quellentext der Software beschäftigst.
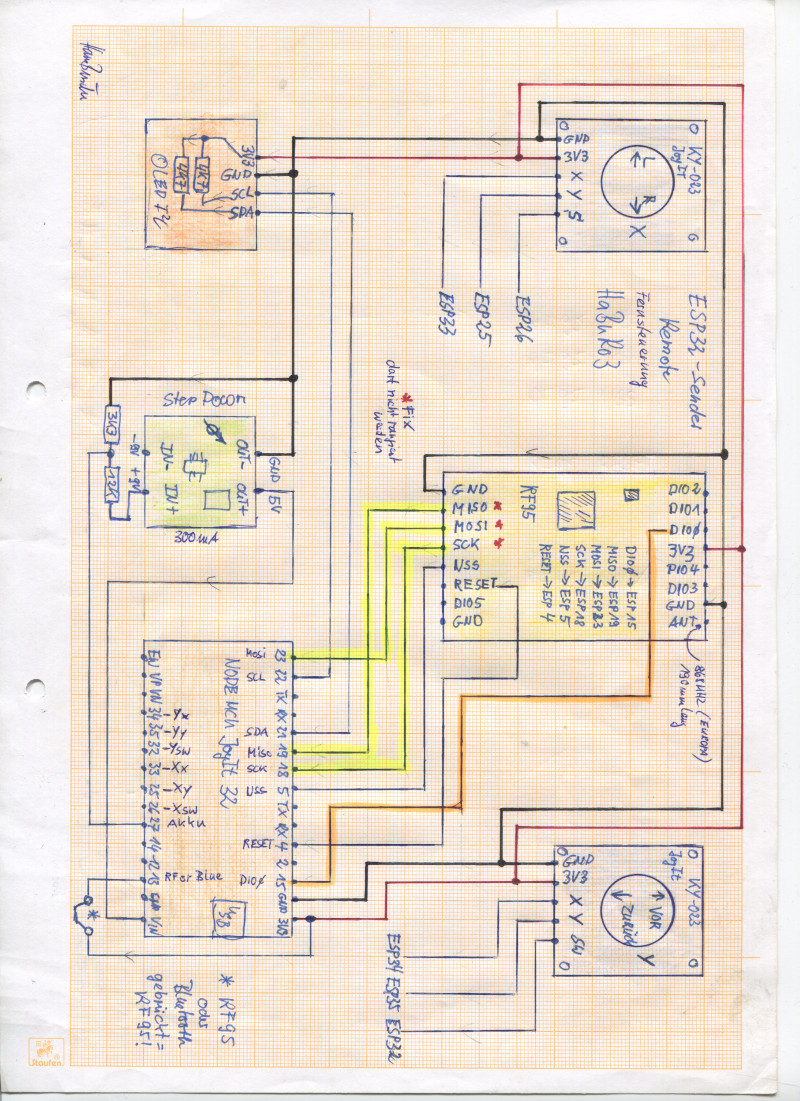
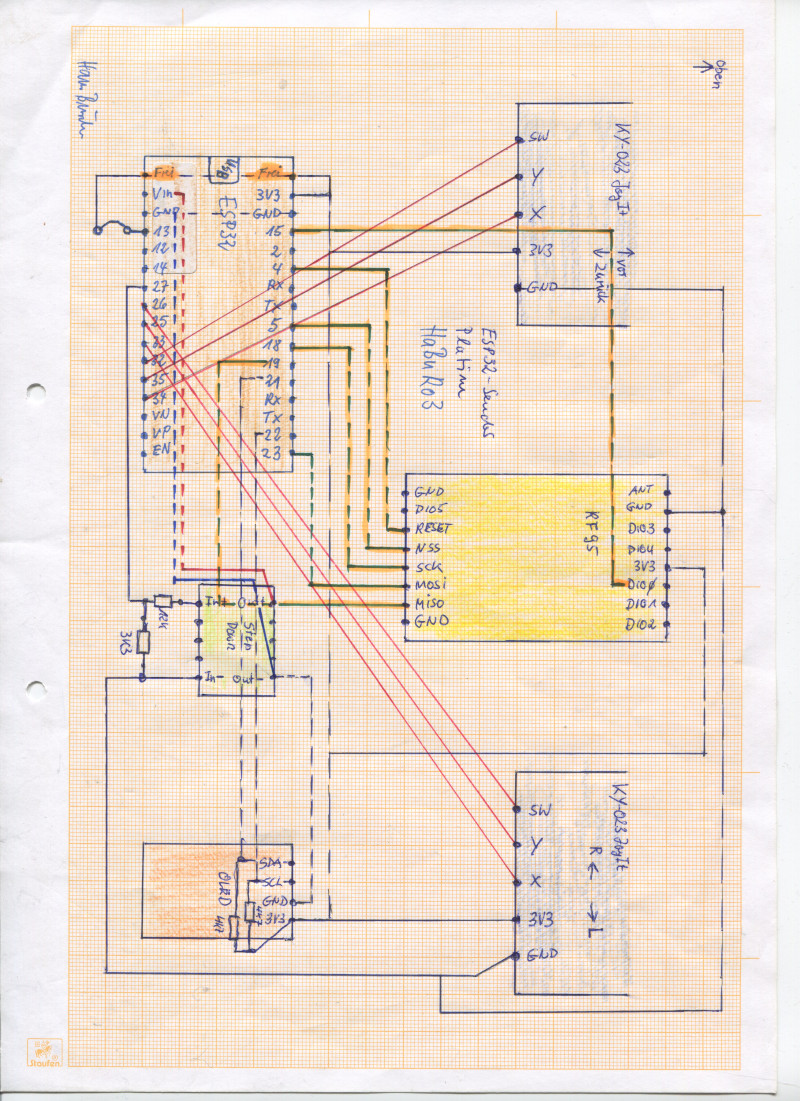
1. Bild, Schaltplan. 2.Bild, gespiegelter Schaltplan für die Platine (Leiterbahnen).
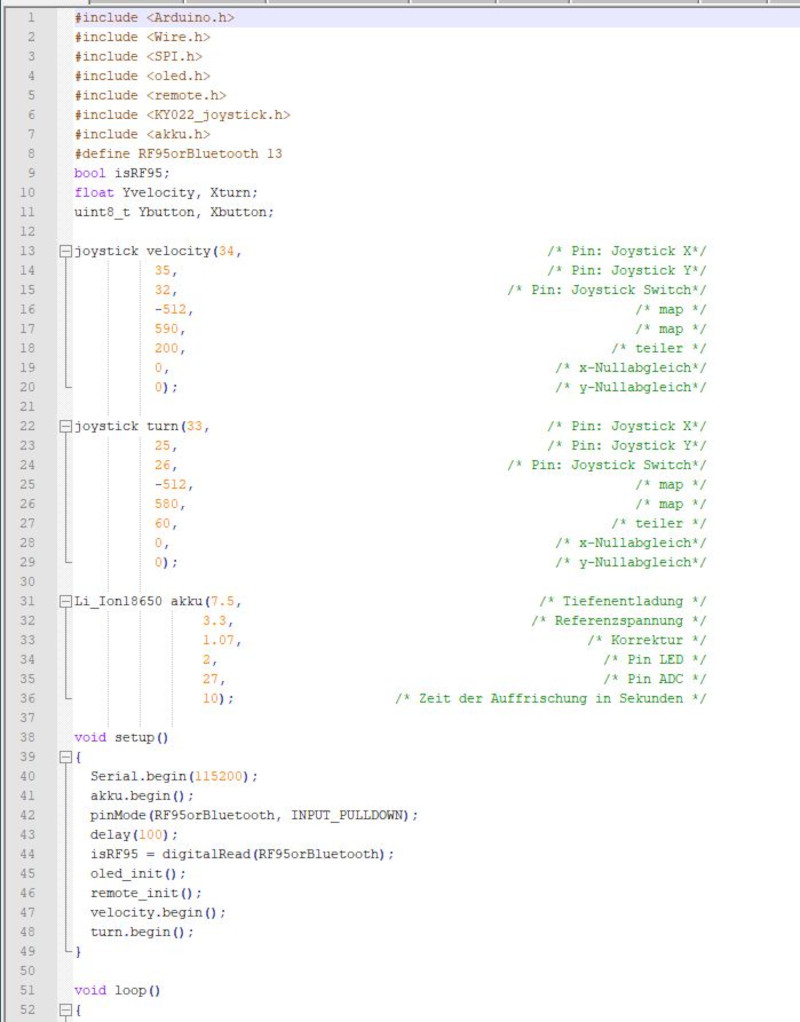
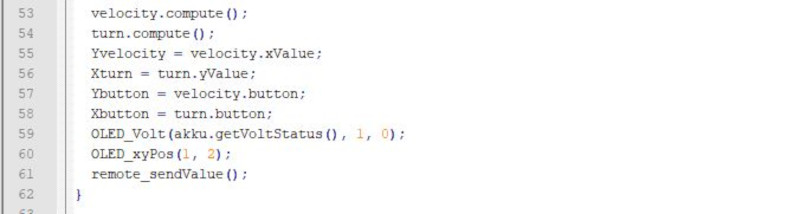
Datei: main.cpp
Externe Bibliotheken:
LoRa (RF95) von Sandeep Mistry
OLED-Display von olikraus
Die Fernbedienung sendet zwei float-Variablen zum Roboter HaBuRo3. Rechter Joystick
velocity (x) und linker Joystick turn (y).
Diese Werte werden auf dem OLED-Display zusammen mit einer Batterieüberwachung visualisiert.
Die Software besteht aus vier Modulen: Joystick, Display, Batterieüberwachung und Sender.
Siehe weiter unten in dieser Beschreibung.
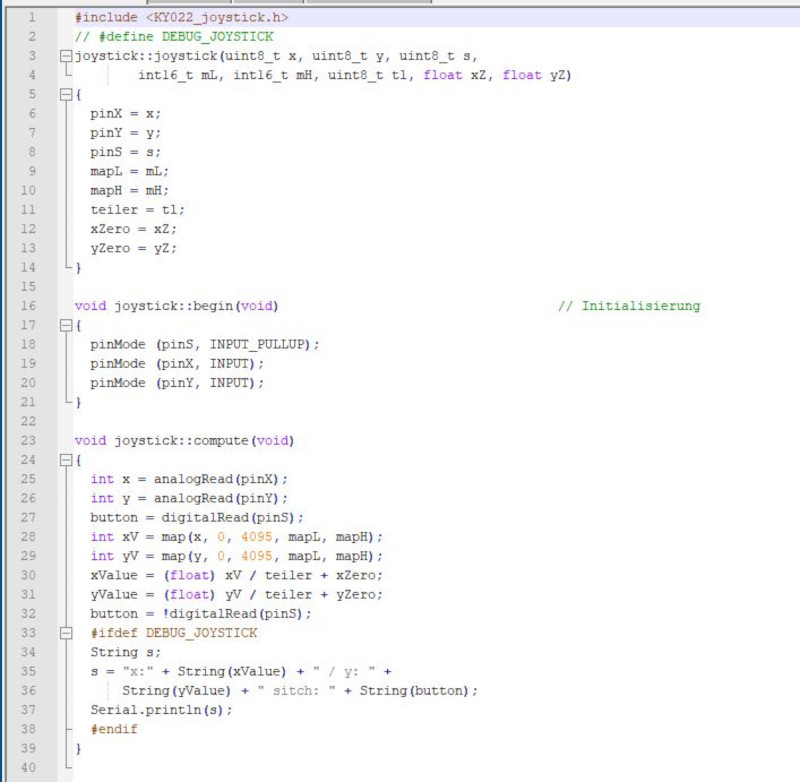
Datei: KY022_joystick.cpp
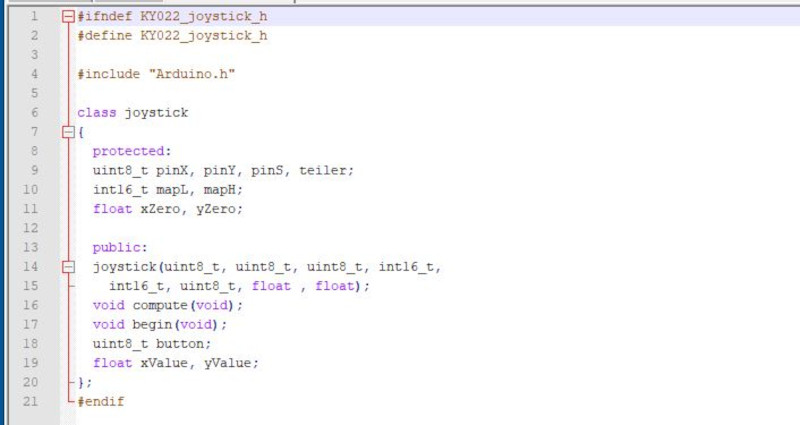
Datei: KY022_joystick.h
Die Mittenstellung des Joysticks muss ein Signal „0“ (Null) liefern. Das ist nicht der Fall.
Weiterhin benötige ich die Funktionalität für zwei Joysticks, jedoch mit anderen Parameter.
Darin liegt die Begründung, warum es hierfür eine eigene Klasse gibt. Der Mittenstellung-Abgleich
erfolgt in den Zeile 28 bis 31.
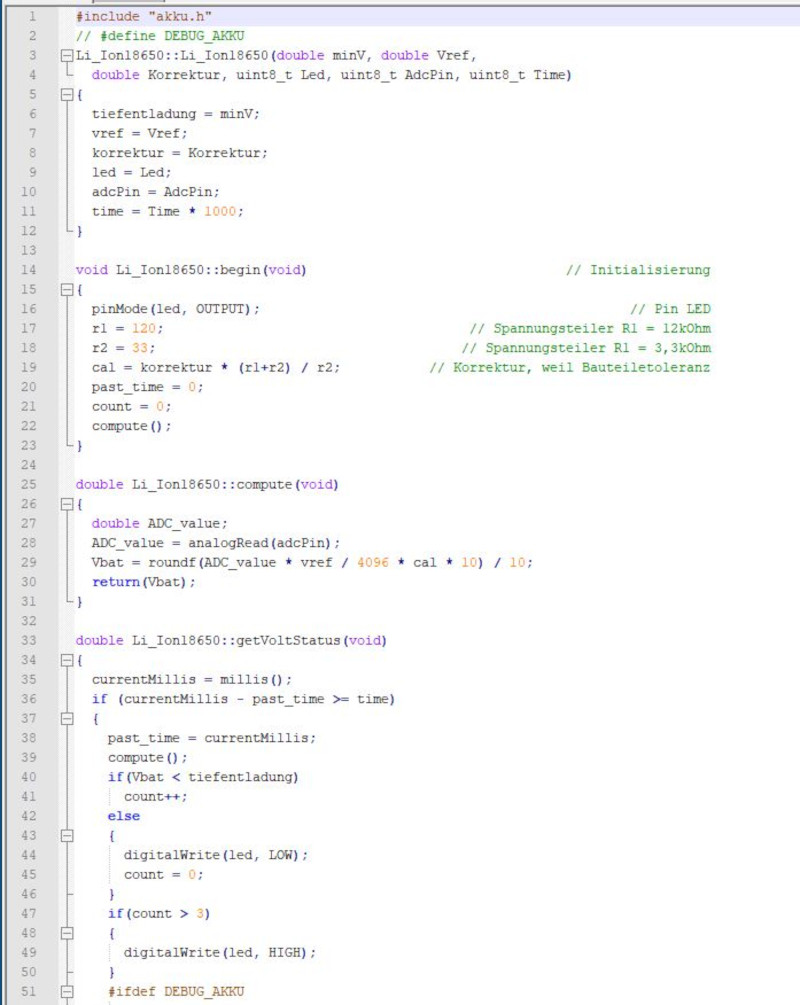

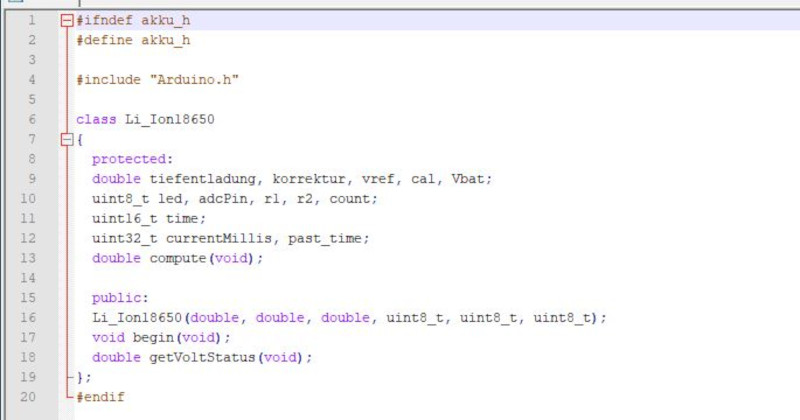
Datei: akku.cpp
Datei: akku.h
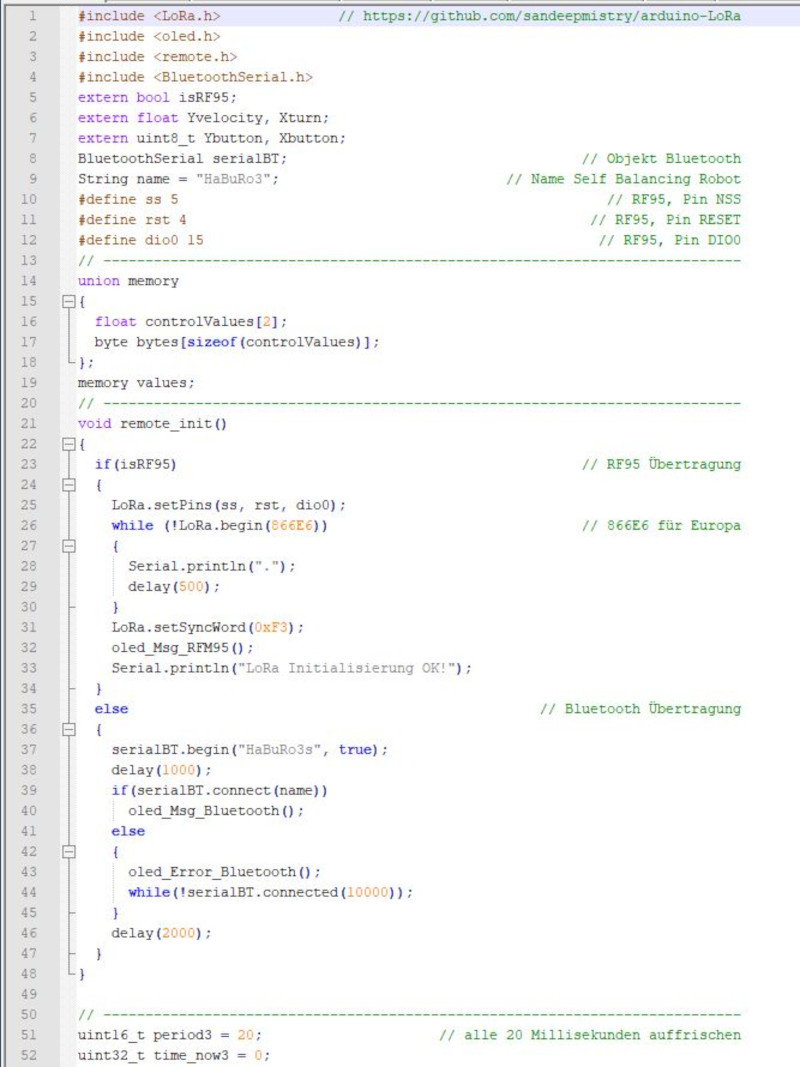
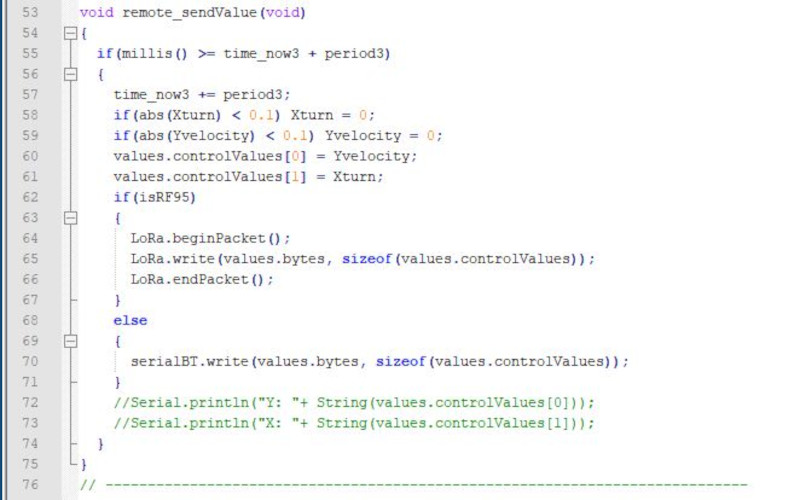

Datei: remote.cpp
Datei: remote.h
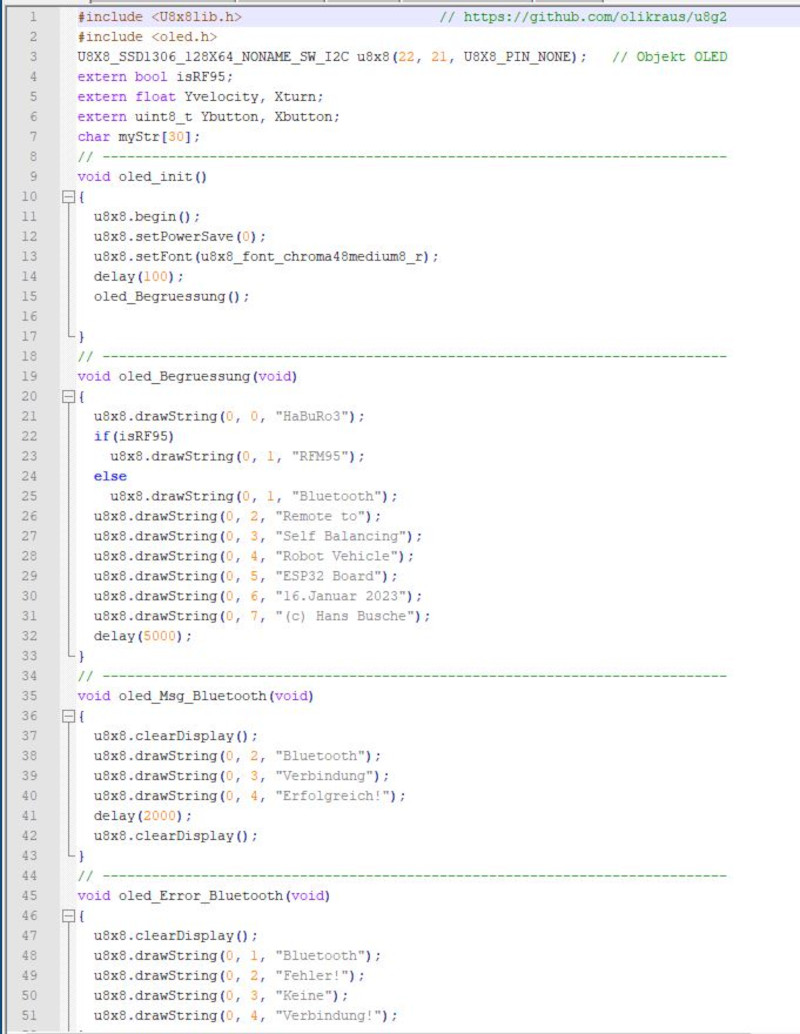
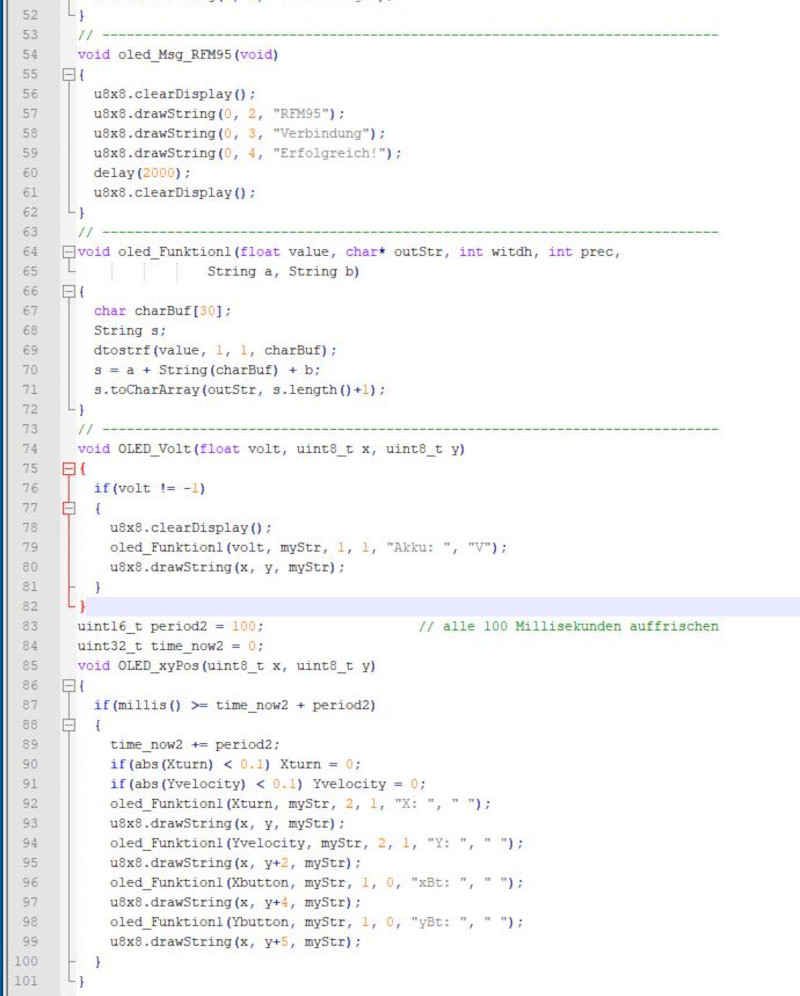
Datei: oled.cpp
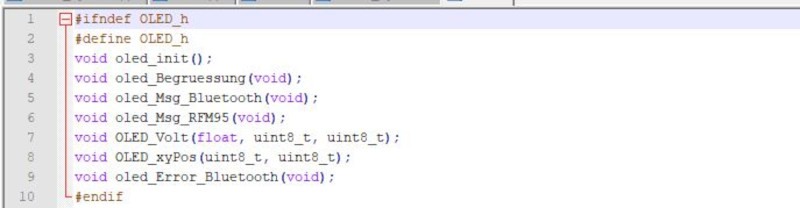
Datei: oled.h