HaBuRo3 Bauteile aus Holz
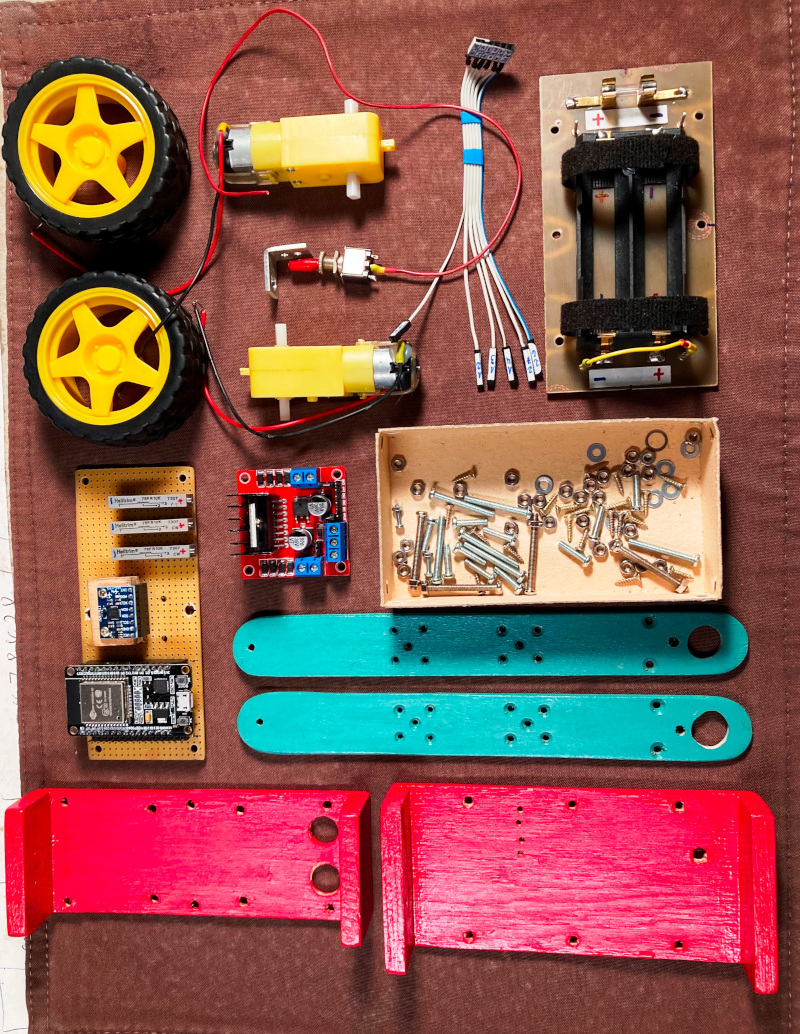
Der selbstbalancierende Roboter HaBuRo3 ist ein Baukasten. Alle Holzteile
und Aufbauten sind demontierbar. Es wurde an keiner Stelle Holzleim eingesetzt.
Folgende Holzarten wurden verbaut: Seitenwangen aus Buchenholz. Elektronische
Bauteileträger aus Sperrholz (Pappelholz). Seitenteile der Bauteileträger aus
Eichen-Lamellenparkett (160x10x8). Die habe ich über Jahre gesammelt.
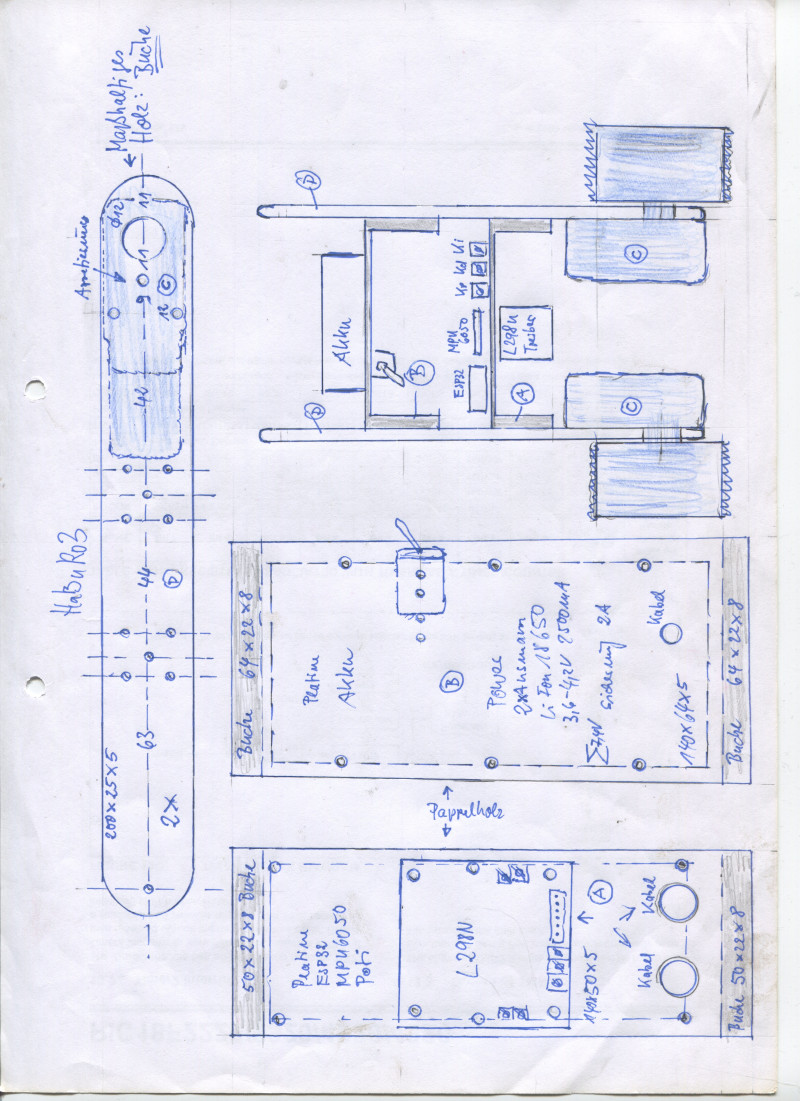
Die Festlegung, was ist vorn, hinten, links und rechts, ist bei der Anfertigung
der Holzteile sehr wichtig.
Schaut man auf den HaBuRo3 und sieht man die UBS-Buchse
des Mikrocontrollers ESP32, so ist das die Rückseite! Diese Festlegung zieht sich wie
ein roter Faden durch das gesamte Projekt. Auch in der Software ist die Beibehaltung
dieser Definition sehr wichtig. Drehrichtung der Motoren, Position des MPU6050 und die
Kurvensteuerung beziehen sich auf diese Festlegung.
Holzfarbe: Acryl-Lack, Deko und Bastellack. Der wasserbasierende Lack ist
witterungsbeständig, stoß- und schlagfest. Fünf Euro. Baumarkt.

Drei Ebenen: Fahrwerk, Steuerung und Energieversorgung!
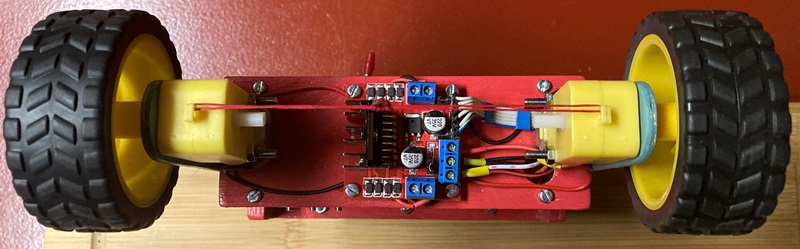
Fahrwerk: Motortreiber, H-Brücke für zwei Motoren!
Alle Bauteile, auch die elektronischen Komponenten, sind zur Mitte ausgerichtet,
bezogen auf die zwei Seitenteile.
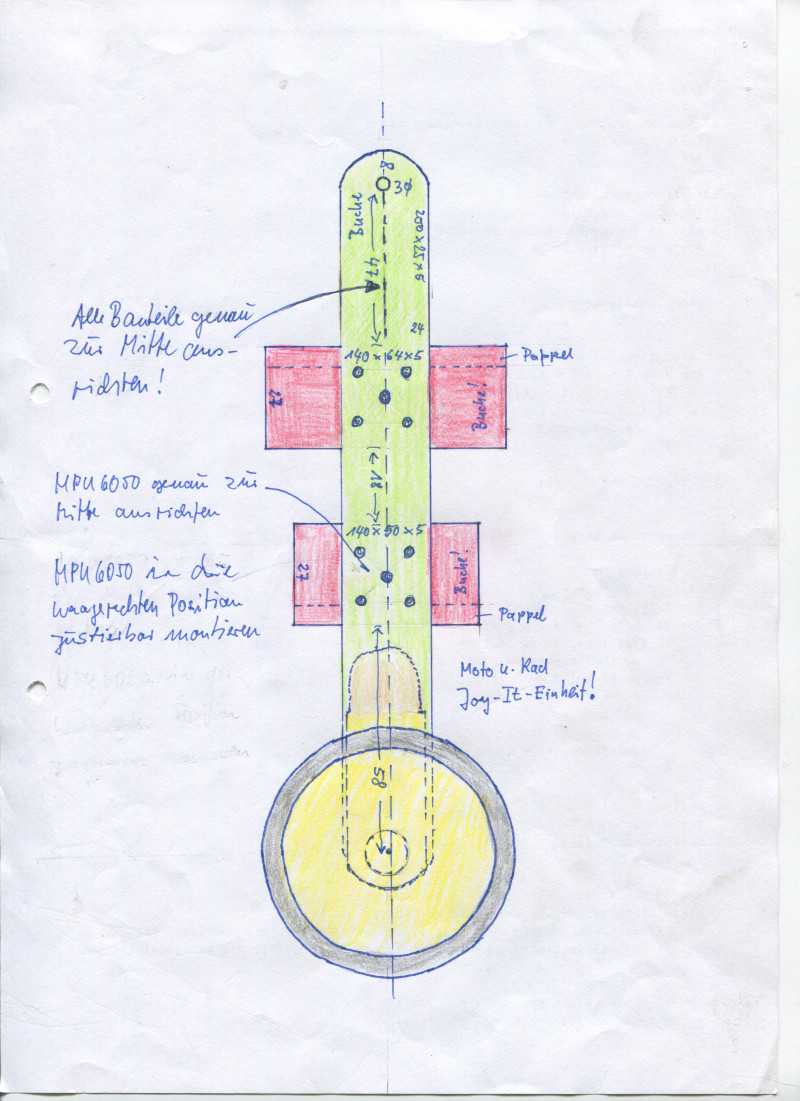
Am oberen Ende des Roboters sind an den Seitenteilen zwei 3mm Bohrungen. Hier wird
der HaBuRo freischwebend aufgehängt. Neben dem MPU6050 positioniere ich eine kleine
Wasserwaage. Das sind dann ideale Voraussetzung für die Kalibrierung des
Beschleunigungssensors und Gyroskop (MPU6050)
HaBuRo3, Daten:
Gesamtlänge: 220 Millimeter
Seitenwangen: 200 Millimeter
Breite: 69 Millimeter
Gewicht: 560 Gramm
Akku: 2 x 18650 LiPo, 7,2 Volt
Strom: 69 bis 810 mA
Beschleunigungssensor und Gyroskop: MPU6050
Mikrocontroller: ESP32, Joy-It
Motor-H-Brücke: LM298N, Joy-It
Motor: 2 x Getriebe-Joy-It 1:130U