Akku
Betrachtet man Batterie-Technologie aus heutiger Sicht, kommt als
Energieversorgung für den selbstbalancierenden Roboters HaBuRo3 nur
die Lithium-Ionen-Variante in Frage. Ich brauche für die Motoren
(Gear Motor Joy It) mindestens 6,2 Volt. Einen zweilagig verschweißten
Akkupack (LiPo 7,2V 2x20C) kann ich nicht einsetzen. Der
selbstbalancierenden Roboters HaBuRo3 soll nach Möglichkeit mit
Bordmitteln zusammengeschustert werden und ich habe kein LiPo-Ladegerät
mit Balancer. Lithium-Ionen-Akku des Typs
18650 habe ich und die Ladeinrichtung auch. Nachfolgend nun die Details
zur Energieversorgung des selbstbalancierenden Roboters HaBuRo3.
18650 Lithium-Ionen-Akkus, Firma Ansmann:
Ladeschlussspannung:
4,3 Volt
Nennspannung: 3,6 Volt
Entladeschlussspannung: 2,5 Volt, bedeutet
Tiefenentladung und der Akku ist defekt!
Bei zwei Akkus in Reihenschaltung
erhält man folgende Daten:
Ladeschlussspannung: 8,6 Volt
Nennspannung: 7,2 Volt
Entladeschlussspannung: 5,0 Volt
Abschaltung HaBuRo3
bei 6,6 Volt
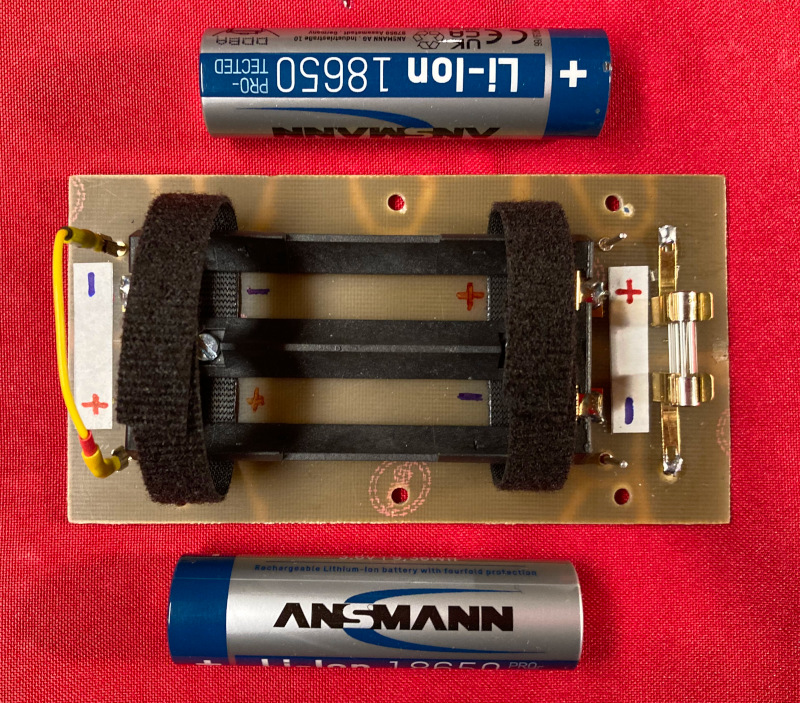
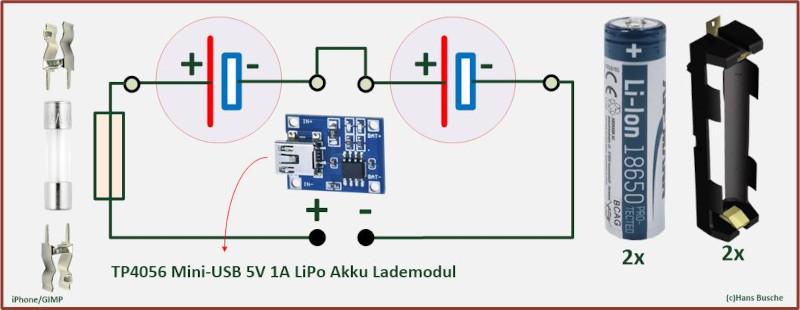
Für beide Akkus sind Lötstifte auf der Platine integriert.
Diese sind mit Drahtbrücken ausgestattet und erlaubt das Laden der Akkus mit einem
einfachen Lademodul: TP4056, Mini-USB 5V/1A Lithium Battery
Charging Module. Dieses Breakout kostet einen Euro!
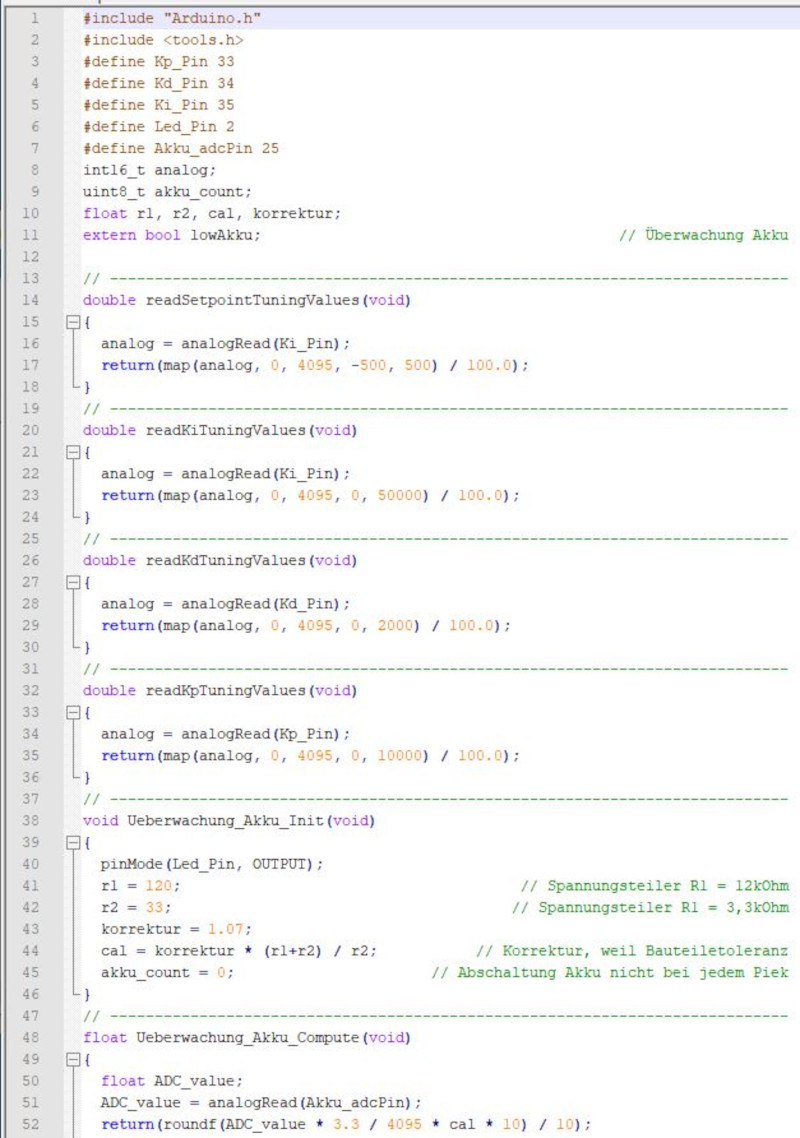
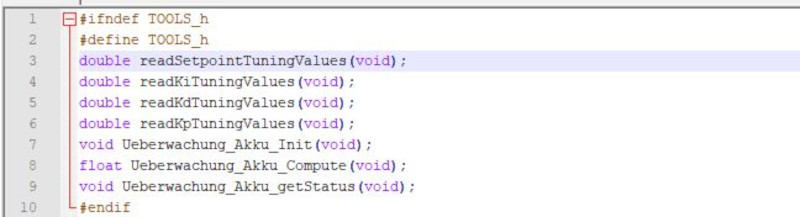
Die Akku-Überwachung steckt in der Datei: tools.cpp und tools.h.
Zeile 7: ADC-Pin für die Akku-Überwachung. Zeile 10: Variablen für die Akku-Überwachung.
Zeile 38 bis Zeile 46: Initialisierung für den Setup(),
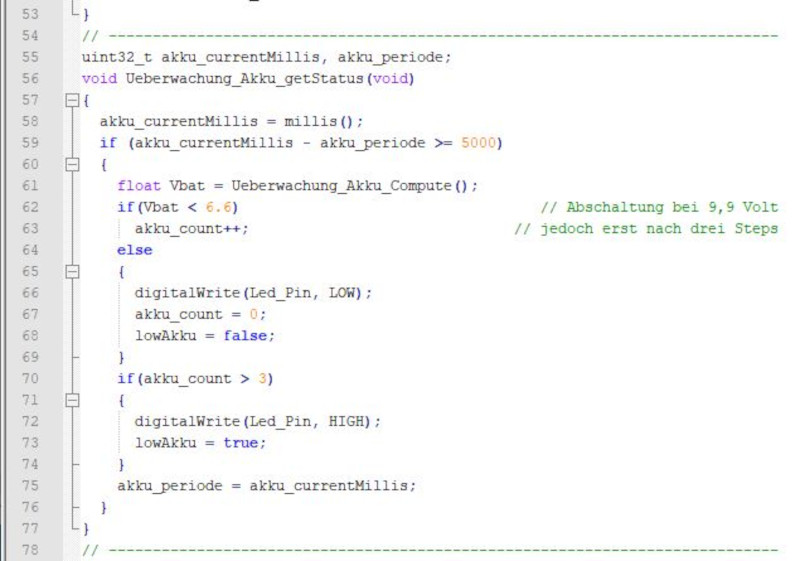
void Ueberwachung_Akku_Init(void). In den Zeilen von 55 bis 77 wird die Ist-Spannung des
Akkus berechnet. Liegt die Spannung nach einem Zeitfenster von 20 Sekunden unter 6,6 Volt wird
die blaue Leuchtdiode des Mikrocontrollers ESP32 aktiviert und die Motoren werden abgeschaltet. Die
Auslösung der Spannungsüberwachung hat zur Folge, dass der Roboter sofort umkippt!