HaBuRo5 Auto Roboter.
Schneller, mehr Power, leichter und wendiger als der HaBuRo1.
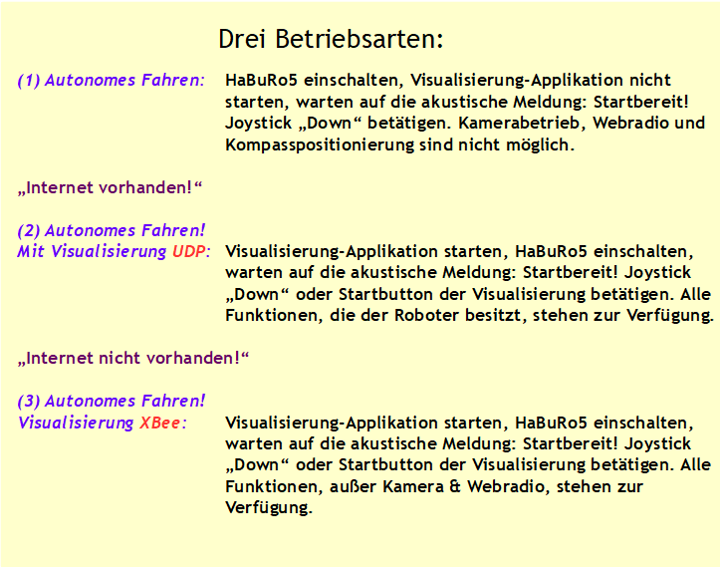
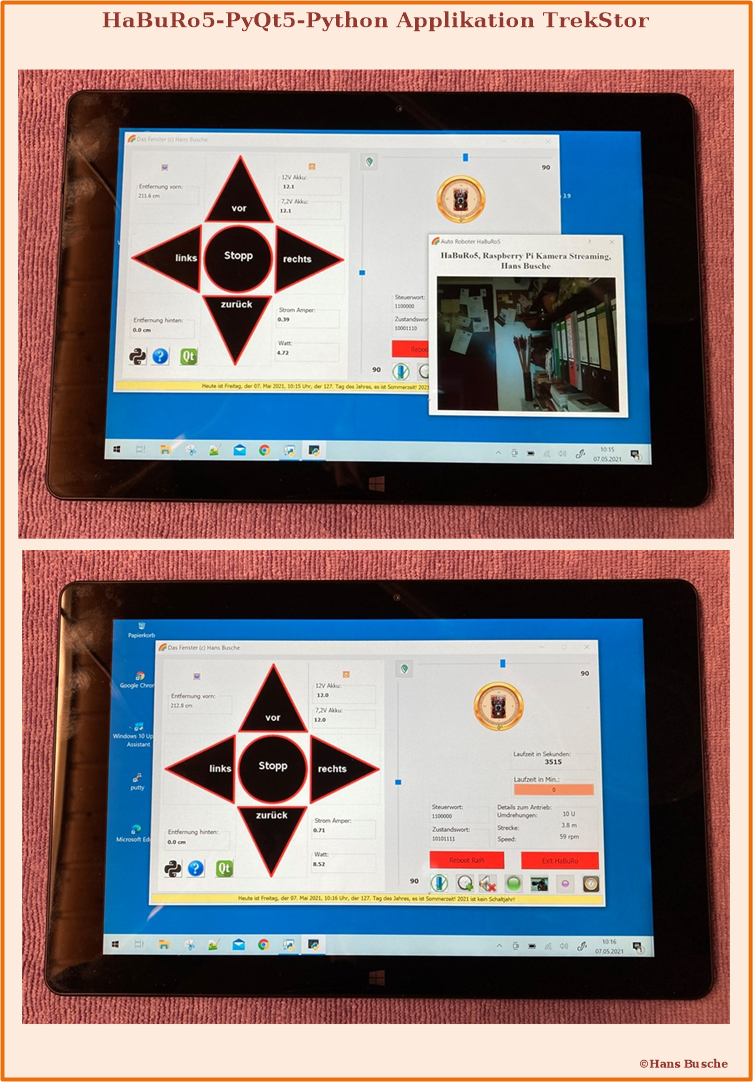
Autonomes Fahren mit PC-App-Parallelbetrieb und Kamera Webserver.

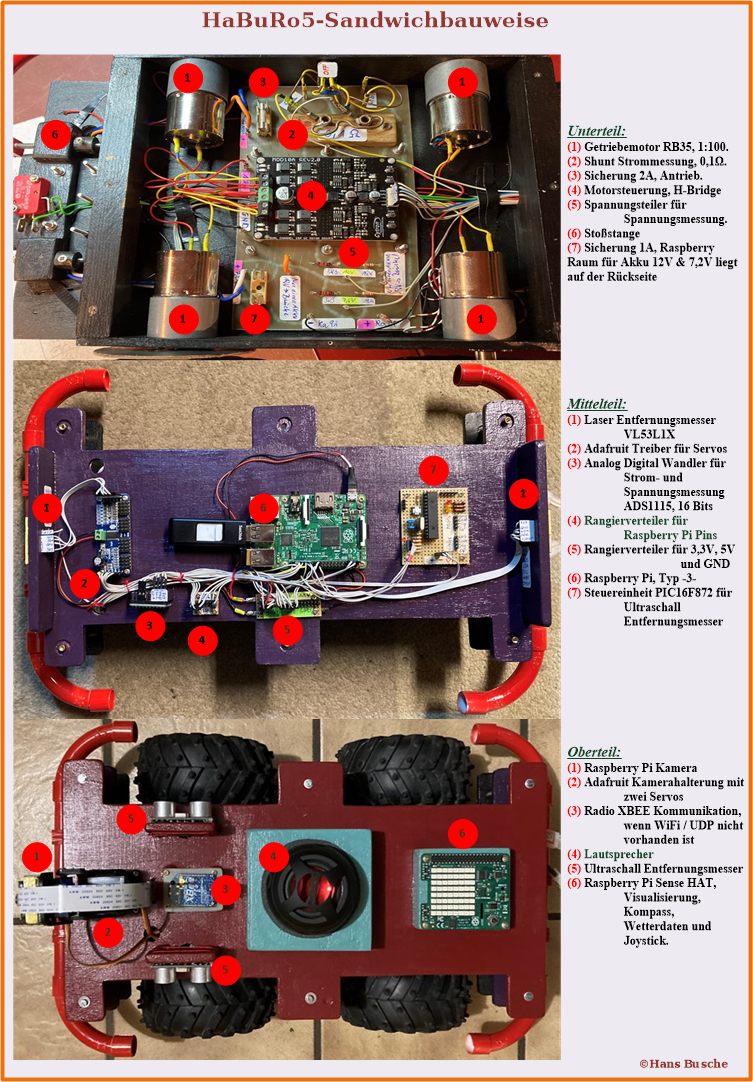
Der Antrieb besteht aus vier Getriebemotoren RB-35, Untersetzung 100:1, Gleichspannung 12 Volt, maximaler Laststrom 2,1A,
Drehmoment 180 Ncm und eine Lastdrehzahl von 52 Umdrehungen pro Minute. Ein Zweikanal Motor Treiber (H-Brücke), 10A-5 bis 30 Volt,
steuert die vier Motoren. Die Geschwindigkeit wird durch eine Pulsweitenmodulation geregelt.
Erkennt ein Annäherungssensor in
Fahrtrichtung ein Hindernis mit einer Distanz von kleiner 400 Millimeter, dann wird die Geschwindigkeit reduziert.
Bei einem Abstand zum Hindernis kleiner 200 Millimeter erfolgt eine Richtungsänderung. Die Richtungsänderung erfolgt
in drei Phasen: Meldet der rechte Abstandssensor kein Hindernis erfolgt eine Rechtskurve. Ansonsten wird der linke Sensor
abgefragt. Ist auch dieser nicht frei, erfolgt eine Rückwärtsbewegung.
Parallel zum autonomen Fahren kann auch eine
grafische Benutzeroberfläche genutzt werden. Besteht eine Internetverbindung (WLAN [WiFi]) dann erfolgt die Kommunikation
per User Datagram Protocol (UDP). Ansonsten besteht die Möglichkeit per Funk (XBee Radio). Als Steuerung wurde ein
Raspberry Pi verbaut. Zusätzlich besitzt der Roboter eine Sensorplatine (Sense HAT). Diese Platine stellt folgendes
zur Verfügung: Leuchtdioden Matrix für Fahrtrichtungsanzeige und Textmeldungen als Laufschrift. Auswertung von Temperatur,
Luftdruck und Feuchtigkeit. Joystick für Kommandos. Kompass für die Visualisierung der Roboter Position. Weiterhin
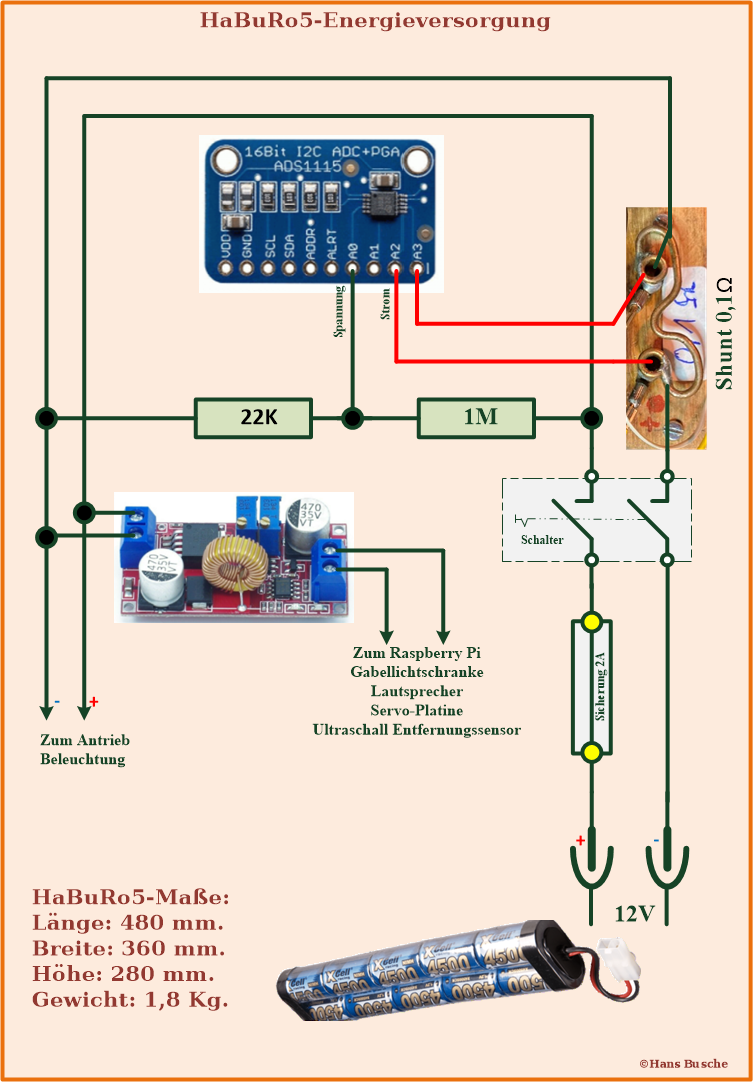
besitzt dieses Vehicle einen Analog Digital Konverter für die Auswertung von Spannung und Strom. Eine Python Bibliothek „eSpeak“
ermöglicht Sprachausgabe in deutscher Sprache (TTS-Sprachsynthesizer). Alle Informationen und Störungen werden über
einen Lautsprecher ausgegeben, so meldet der Roboter eine 12 Volt Akku Tiefenentladung sofort und schaltet den Antrieb ab.
All diese zusätzlichen Funktionen können nur genutzt werden, wenn die PC-GUI-Applikation aktiv ist. Ach so! Webradio ist auch
möglich.-Spielerei pur!
Nach dem HaBuRo5 ist Schluss! Einen weiteren Roboter werde ich nicht bauen. Ich habe ein kleines
Problem, der Roboter ist fertig und das Rumkurven im Gelände macht mir nicht den richtigen Spaß. Es wird langweilig
ohne „Kamera“, weil das WiFi-Netzwerk im Freiem nur teilweise vorhanden ist. Da ist zum Beispiel ein Igel im Garten,
ich möchte den Roboter ganz vorsichtig in Position bringen und dann den Igel per Kamera–Webserver beobachten!
Und was passiert! Das WiFi-Netzwerk ist außer Reichweite.