Kamera.
Im Gegensatz zum HaBuRo1, hier wurde das Programm mjpg-streamer eingesetzt, funktioniert der HaBuRo5
komplett mit Pythonskripten für die Kamera. Wichtig ist nur, dass die Kamera Software als Thread ausgeführt
wird. Weiter unten in dieser Beschreibung werden die drei notwendigen Module: »Kamera Webserver«,
»Start Stopp« und »Kamera-Servo-Bewegung« vorgestellt.
LISTING OBEN:
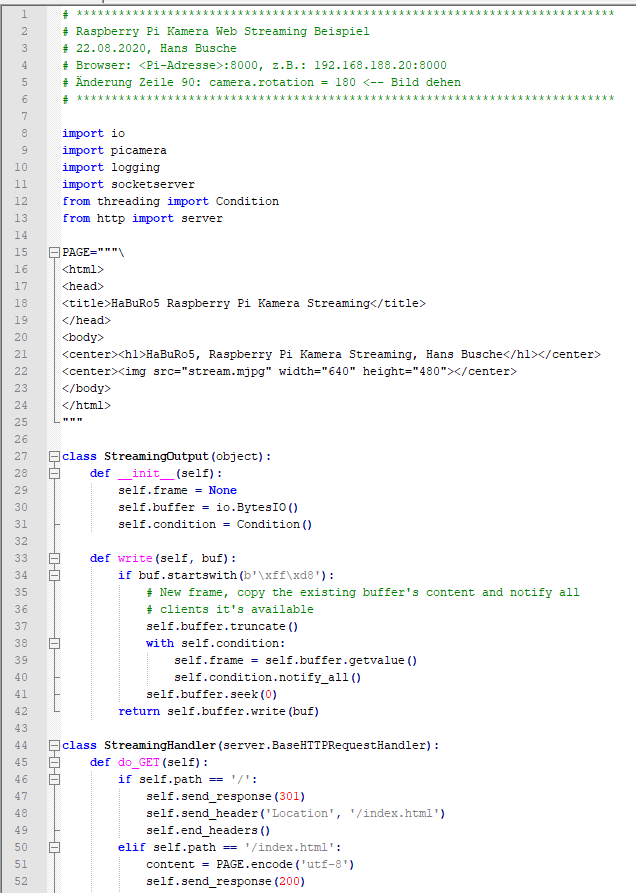
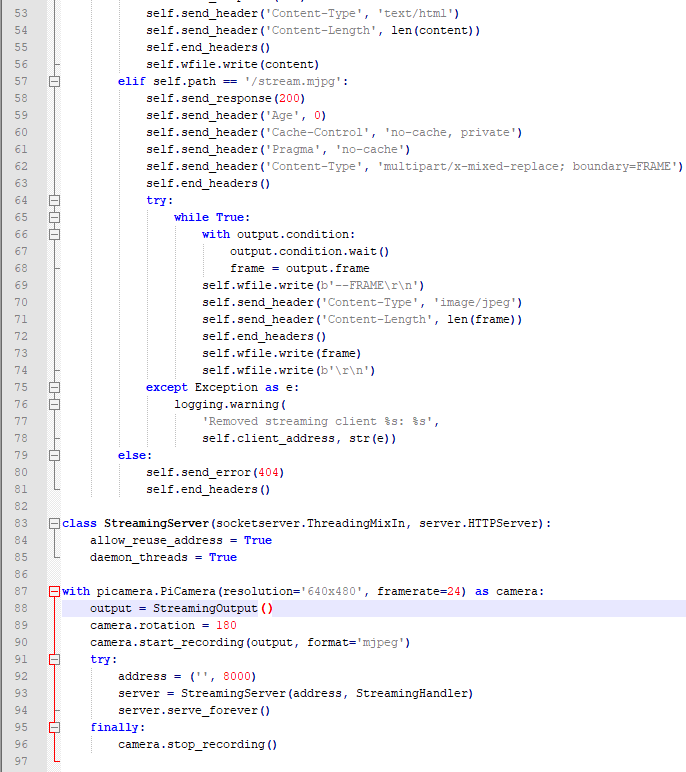
Der hier verwendete Python Kamera Webserver stammt von
»RANDOM NERD TUTORIALS«, »https://randomnerdtutorials.com/video-streaming-with-raspberry-pi-camera/«.
Folgendes wurde für meine Bedürfnisse angepasst:
Zeile 15 bis 24: Textänderungen. Zeile 90: Rotation von 90° auf 180°!
LISTING OBEN:
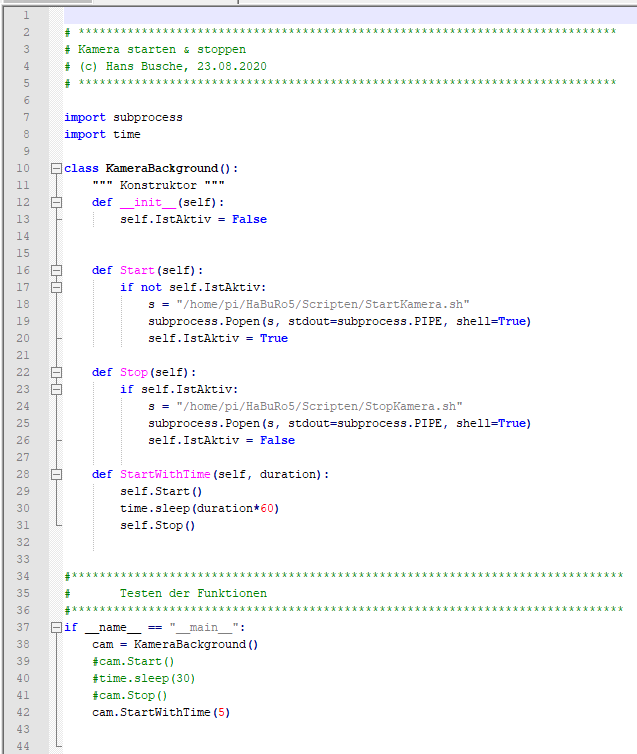
Keine Frage! Es gibt viele Möglichkeiten einen Kamerawebserver zu bauen. Hier meine Variante:
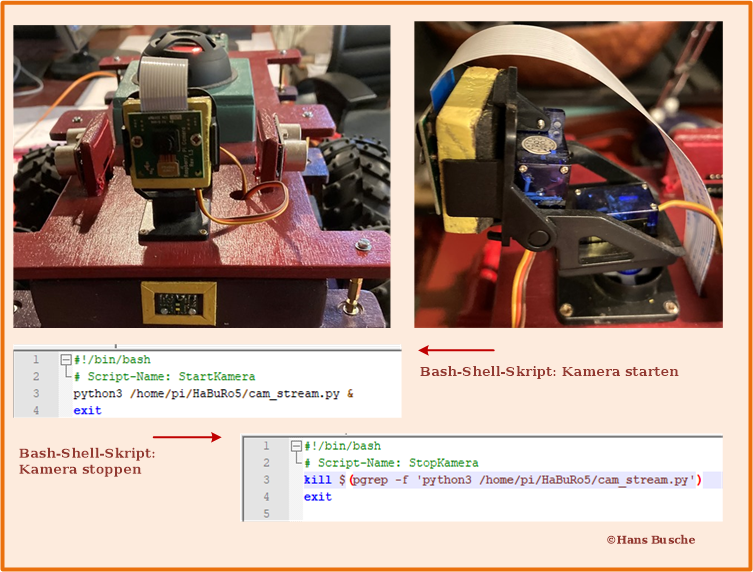
Im erstem Bild oben findest du zwei Bash-Skripts: »StartKamera.sh« und »StopKamera.sh«.
Diese Skripts werden wiederum mit der Biliothek »subprocess« vom Python-Interpreter als
Parallelprozess gestartet. Weitere Details siehe main() bzw. main.py.
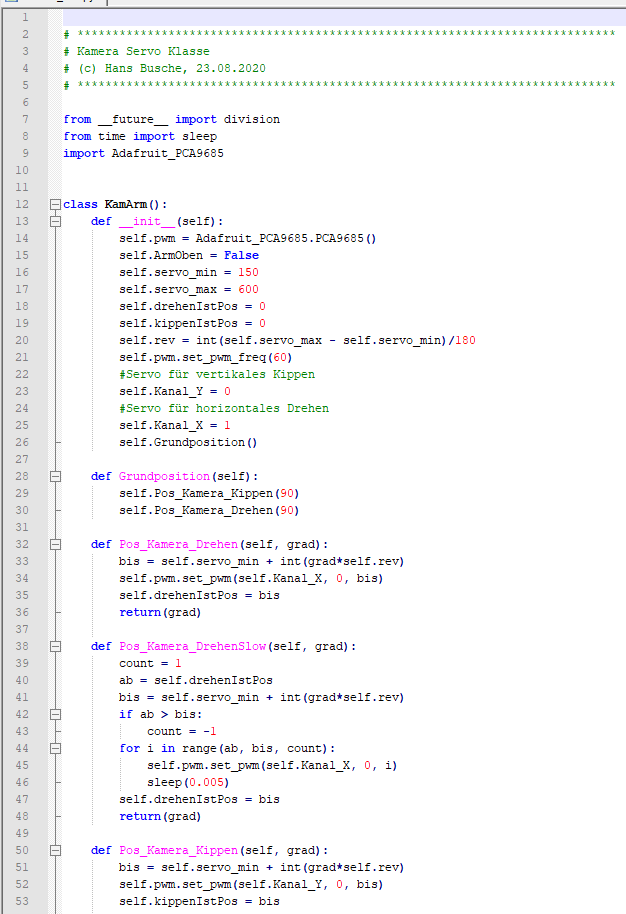
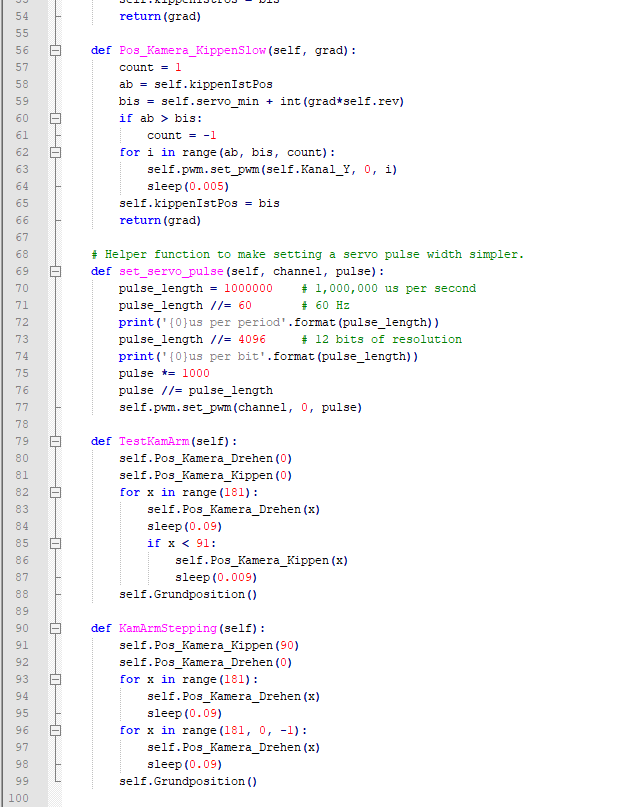
LISTING OBEN:
Zwei Servos positionieren die Kamera in vertikale und horizontale Richtung. Die Positionierung
wird mit Schieberegler, in 0 bis 180 Grad schritten, aus der PC-Applikation heraus ausgeführt.
Auch hier wird auf fertige Software zurück gegriffen. Zum Einsatz kommt die Bibliothek:
»Adafruit_PCA9685« von https://www.adafruit.com/.