HaBuRoArm, Genauigkeitsprüfung des Schrittmotors für den Drehteller
Von besonderer Bedeutung ist die Genauigkeitsprüfung des Schrittmotors für den Drehteller.
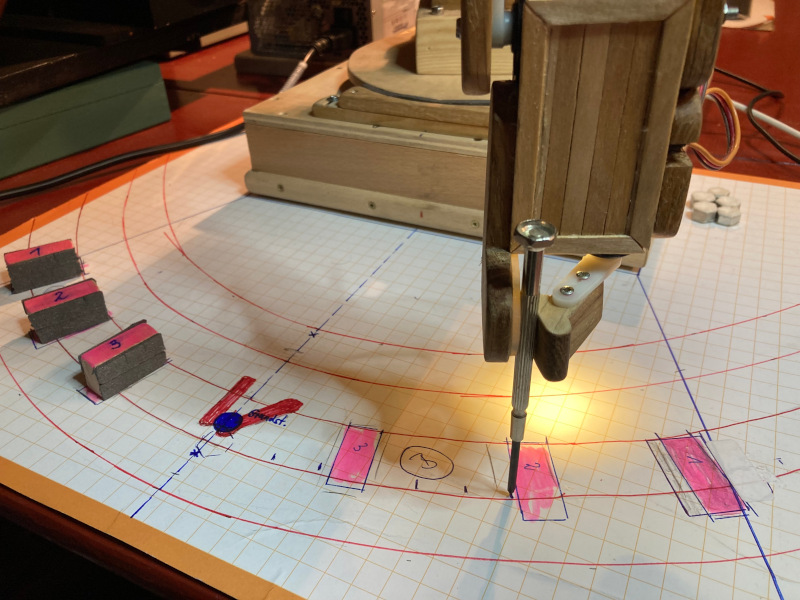
Das nachfolgende Bild zeigt auf, wie ich es gemacht habe. In fünf Grad Schritten habe ich
Markierungen gesetzt und anschließend mit wechselnden Drehrichtungen geprüft, ob der
Schrittmotor immer den Winkel exakt anfährt. Eine Webseiten Dokumentation hat mich da besonders
interessiert.
Stimmt die Genauigkeit nicht, so prüfe in der Software die Verweilzeit
zwischen den einzelnen Schritten, die der Schrittmotor pro Umdrehungen benötigt. Beim Stepper für den
Drehteller war das der Fall. Ich habe die Zeit auf sechs Millisekunden gestellt. Weiterhin müssen
alle Aktoren und Sensoren einen eigenen Thread bekommen.