Software der Fred Feuerstein Fernbedienung

Die Bluetooth Datenübertragung sendet von der Fernbedienung zum Roboter nur ein Byte. In diesen
8 Bits sind alle Informationen enthalten, die der Roboter benötigt.
Die Projekt-Ordner-Struktur ist identisch mit dem Framework des
Roboters. Es werden keine
zusätzlichen Bibliotheken benötigt. Bluetooth ist Bestandteil der ESP32 Hardware und des
Betriebssystems.
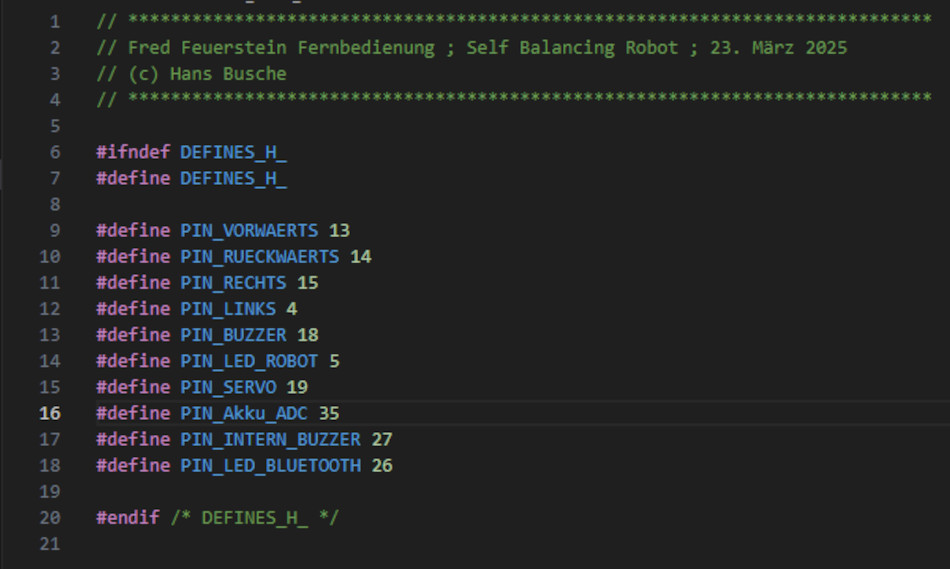
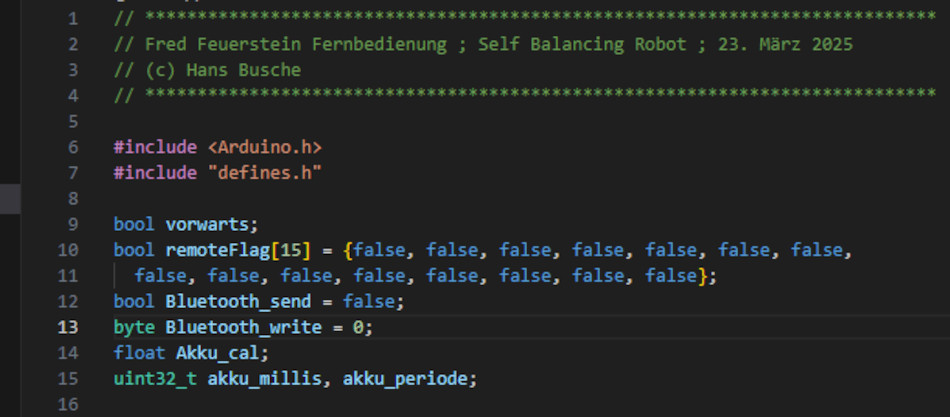
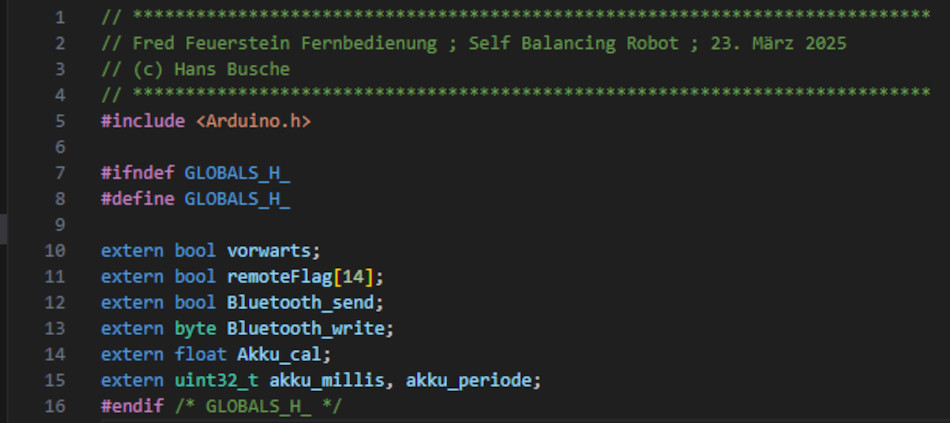
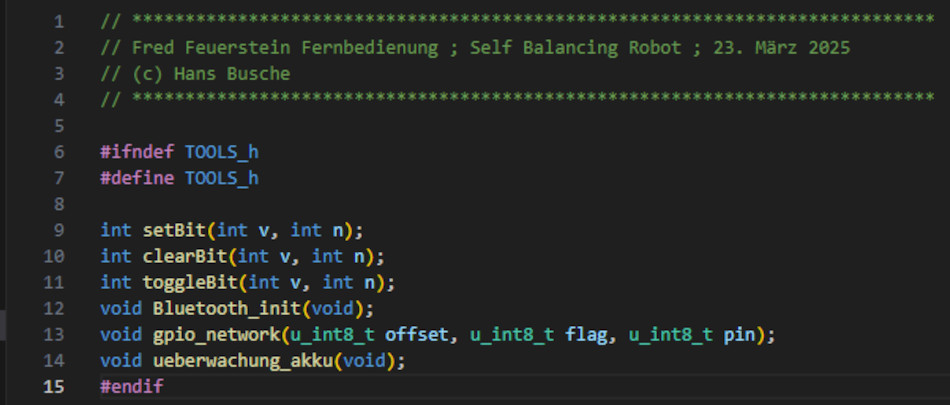
Definitionen, wie GPIO-Eingänge, werden ausgelagert. Globale Daten mit der zugehörigen
Extern-Definition sind ebenfalls in separaten Dateien untergebracht.
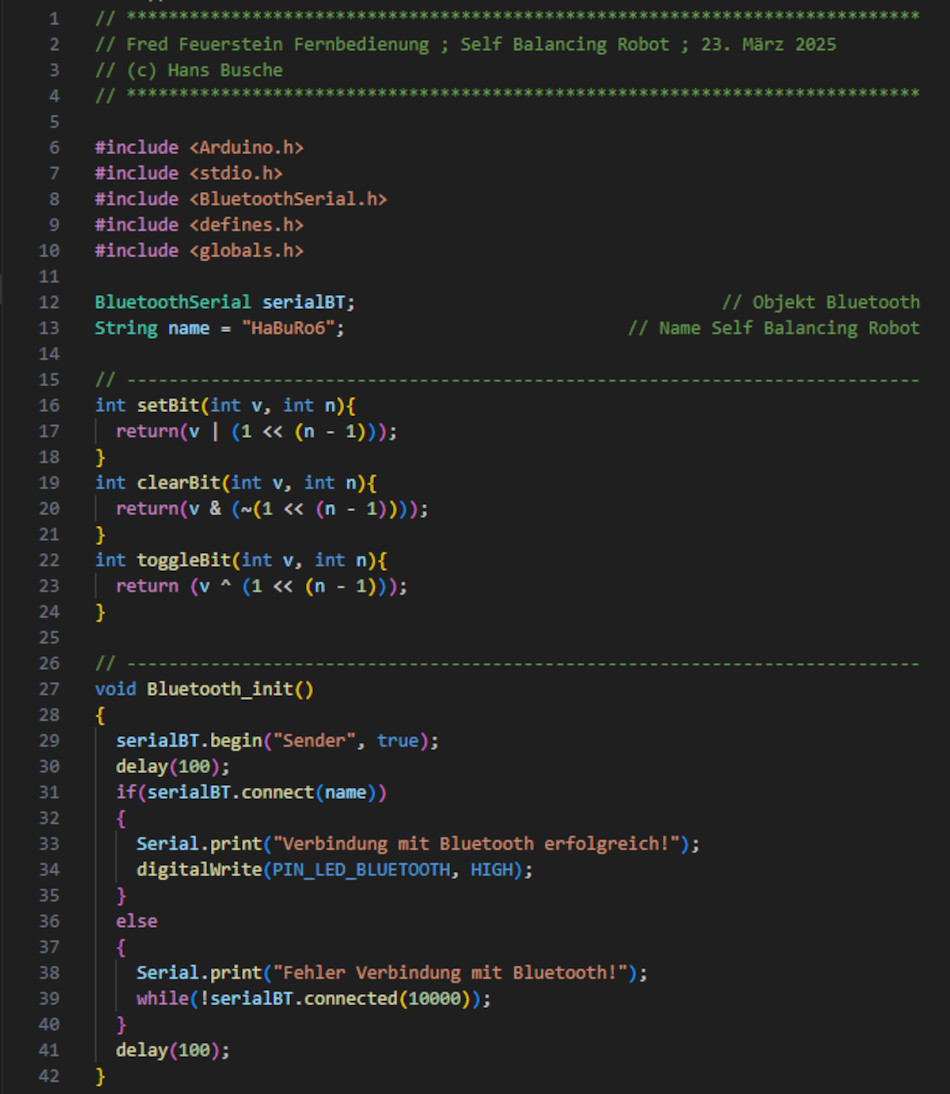
Datei tools.cpp
Zeile 16 bis 24: Funktion zur Manipulation der ein-Byte-Schreibvariable für Bluetooth.
Zeile 27 bis 42: Verbindungsaufbau mit dem Roboter. Der Name in Zeile 31 muss mit der Gegenstelle,
hier der HaBuRo6, identisch sein. Bei einem ESP32-NOW-Interface wäre das die MAC-Adresse des Empfängers.
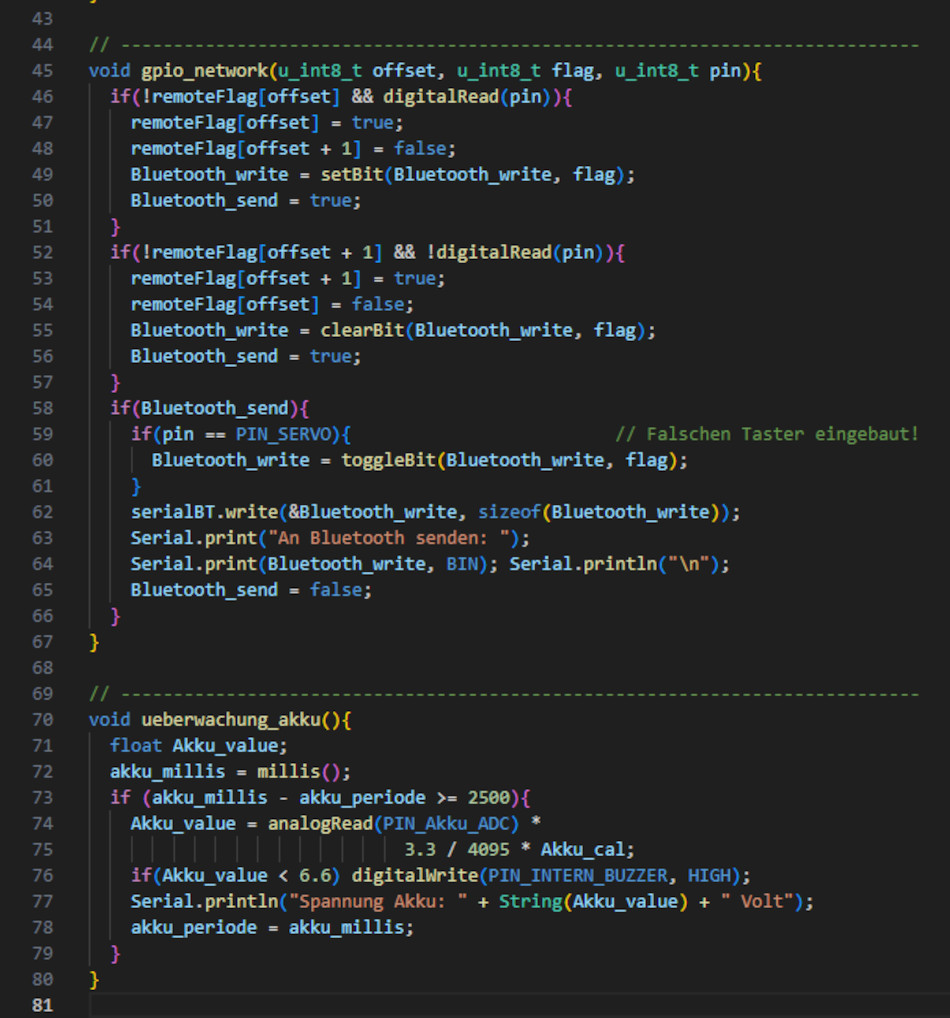
Zeile 45 bis 67: Nur, wenn ein Signalwechsel der Befehlsgeräte (Taster, Schalter usw.) erfolgt darf per
Bluetooth gesendet werden. Weiterhin darf dieser Vorgang nur ein einziges Mal ausgeführt werden!
Dieser Sachverhalt ist mit den vielen Variablen (remoteFlag[offset]) verknüpft.
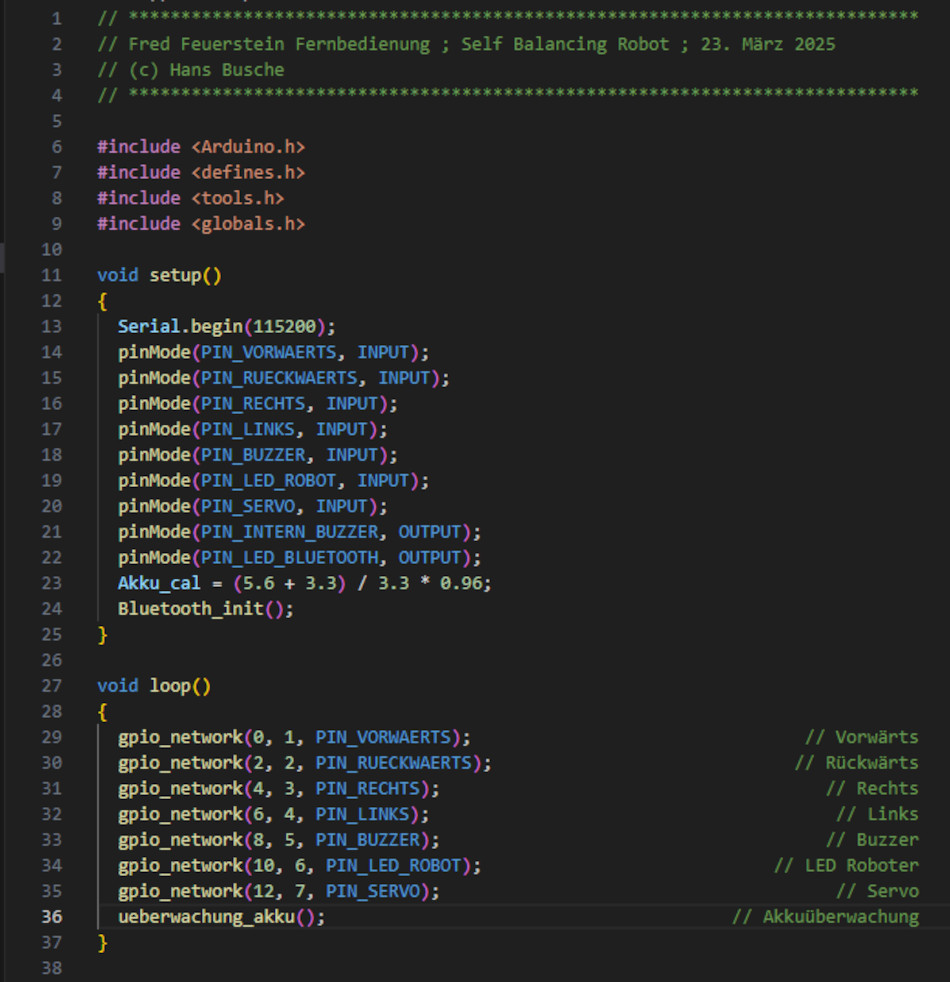
Datei main.cpp
Software der Fred Feuerstein Fernbedienung © 2025 Hans Busche