HaBuRo6 RemoteXY Applikation
Draußen, auf der Terrasse, ist für mich der ideale Platz zum Fahren mit dem Roboter. Jedoch habe ich
dort kein WiFi-Netzwerk. Der ESP32 hat Bluetooths (BLE) an Board. RemoteXY
stellt eine Bluetooths-grafische-Benutzerschnittstelle zur Verfügung und ich habe meinen Roboter damit ausgerüstet.
Die Entscheidung für den Einsatz von RemoteXY war nicht schwierig. Auf beiden wichtigen Smartphone-Betriebssystemen,
wie Android und Apple, läuft die grafische Benutzerschnittstelle (GUI) tadellos. Mein Mobilphone ist ein Apple-iPhone!
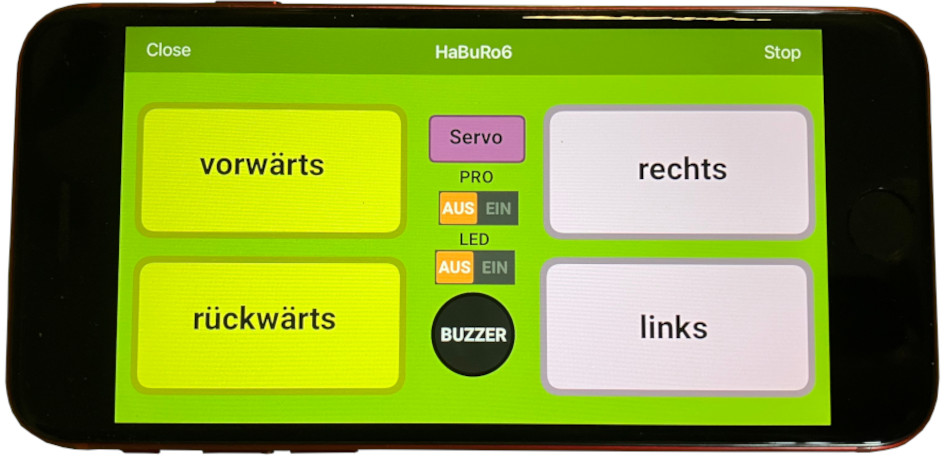
Das obige Bild zeigt die Roboter-App. Sie ist sehr minimalistisch! Warum? Nach einem Monat Betriebszeit mit dem Roboter
hat sich herausgestellt, dass ich noch nie einen PD/PI Regler Parameter verändern musste. Man kann auf die
Implementierung der Parameter-Menüs verzichten.
Die Seite RemoteXY stellt einen Editor zur Verfügung. Weiterhin gibt es dort eine erstklassige Dokumentation.
Andreas Spiess stellt ein Video auf YouTube zur Verfügung.
Das hilft dir sehr.
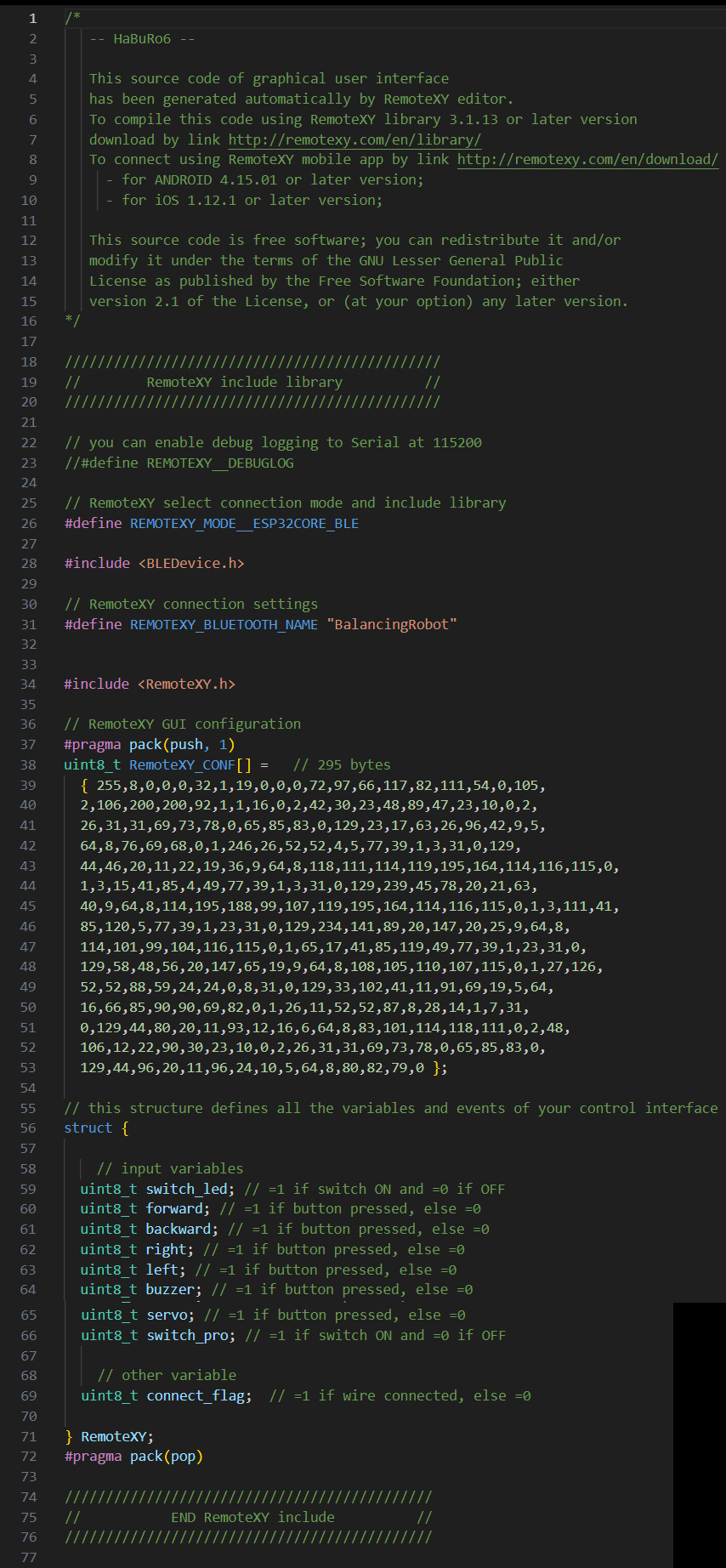
Nachdem du eine grafische Applikation zusammengeklickt hast, musst du diese downloaden. Das obige Bild zeigt das
Ergebnis für den Roboter. Ich habe diese Datei als remote.h in das Visual Studio Code Roboter-Projekt gespeichert.
Die Zeilen 59 bis 66 repräsentieren die Variablen. Achte auf den Unterschied zwischen switch und button.
Nur die Funktionen LED und Fahrprofil PRO sind switch (Schalter), die anderen Befehlsgeräte sind button (Taster).
HaBuRo6 RemoteXY App © 2025 Hans Busche