Schwebender Magnet, Levitation.
Auf der Erde bewirkt die Erdanziehungskraft (Gravitation), dass alle Körper nach
unten fallen. Auch mein magnetischer Schwebekörper unterliegt diesem Gesetz.
soll ein magnetisches Objekt schweben, dann müssen die Gravitationskräfte
und die magnetischen Kräfte, erzeugt durch eine elektrisch bestromten Spule,
im Gleichgewicht sein. Gravitation lässt sich nicht abschirmen jedoch kann
man den magnetischen Fluss regeln.
Der Hall-Effekt-Sensor
spielt hier eine
zentrale Rolle. Auf dieser Webseite möchte ich dir meine Magnetschwebetechnik
vorstellen. Der Raspberry Pi Pico übernimmt die Regelung.
Liebe Leserinnen, lieber Leser!
Zuerst das Positive zu diesem Projekt. Der Neodym
Magnet schwebt stundenlang sogar tagelang. Auch wenn du ihn berührst oder ein leichter
Windhauch ihn tangiert, bleibt er in Position. Spule und Leistungstransistor erwärmen
sich nur sehr gering. Der Raspberry Pi Pico erledigt problemlos die Regelung.
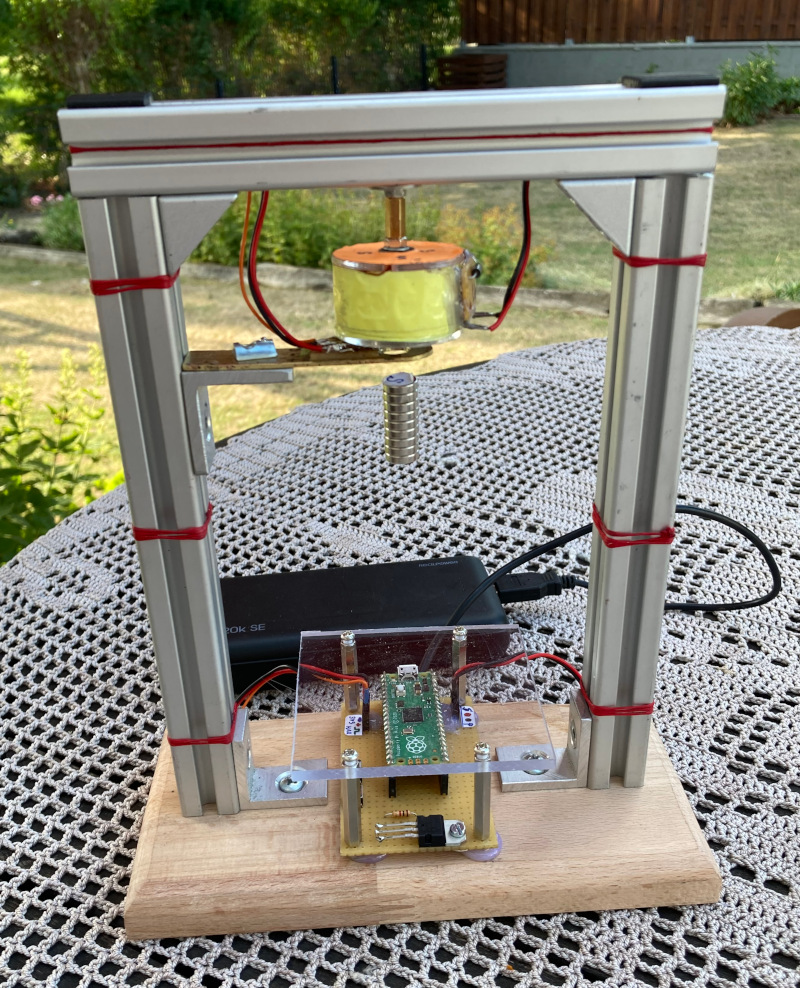
Das obige Bild suggeriert ein einfaches Projekt. Ist es aber nicht!
Alles muss
genaustens miteinander abgestimmt sein: Das Gewicht des Neodym Magneten, die Bauform
(Länge des Magneten), die Positionierbarkeit des Hall-Effekt-Sensors, die Befestigung
des Hall-Effekt-Sensors (Messing) und die Qualität der Spule. Ein Spannungsbereich
von 3 Volt bis maximal 9 Volt muss die Spule dauerhaft vertragen. Das ich die
Spannungsversorgung der Spule zusammen mit der restlichen Hardware fest verbunden habe,
hier 5 Volt, und nicht separat ausgeführt habe, war ein großer Fehler.
Siehe Erweiterung
„Wireless LED“.
Eine weitere Erfahrung: Die Energieversorgung
muss ein sehr stabiles 5 Volt Netzteil sein. Ein USB-Adapter-Netzteil, wie man es für
Smartphones und Ähnlichem verwendet, auch wenn es 2 Ampere Strom liefert, geht nicht.

Oben siehst du die erforderlichen Bauteile. Ich will dich hier nicht zum Kauf irgendwelcher
Konstruktionsteile animieren! Um Gotteswillen! Nur zum schnellen Aufbau sind diese
Aluprofile
ganz nützlich.
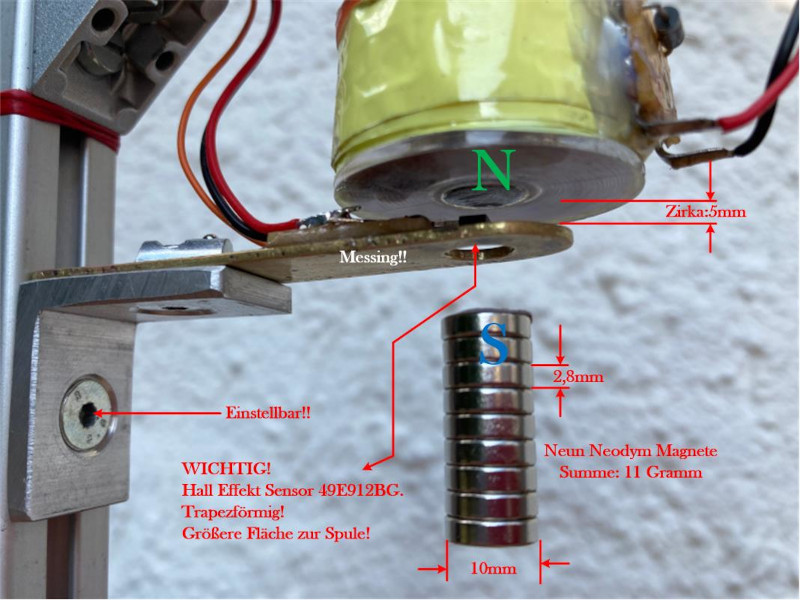
Wo ist der Südpol, wo der Nordpol eines Magneten? Das ist bei der Magnetschwebetechnik
im Zusammenhang mit dem Hall-Effekt-Sensor von ausschlaggebender Bedeutung. Eine Möglichkeit
so etwas herauszufinden findest du
hier.
Weiterhin muss der Hall-Effekt-Sensor einen Abstand zur Spule mit Eisenkern haben. Bei mir sind
das fünf Millimeter. Als Schwebeobjekt habe ich neun Neodym Magnete 2,8x10mm verwendet.
Es hat sich herausgestellt, dass man mit einem länglichen, nach unten schwebendem Körper
(Zylinder) besser zurechtkommt als mit einem kürzeren und breiteren Körper. Auch mit der
Gewichtsverteilung, hier sind es 11 Gramm, kommt man besser zurecht. Ist bei Bestromung
der Spule der Eisenkern unten der Nordpol so muss die größere Fläche des Hall-Effekt-Sensors
zur Spule zeigen. Das ist ganz wichtig!
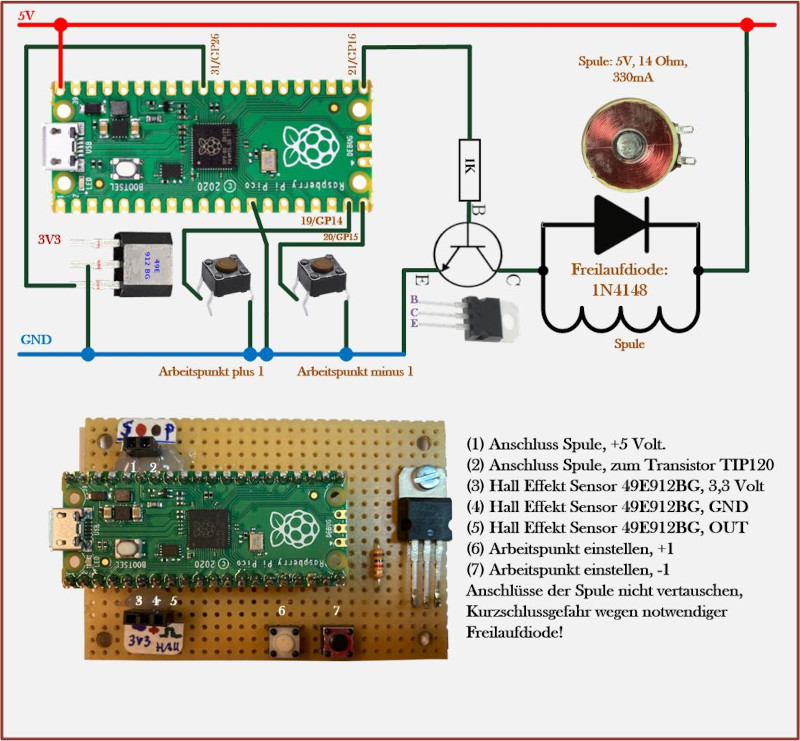
Die parallel zur Induktionsspule geschaltet Freilaufdiode sollte direkt am Spulenanschluss
verlötet werden. Die Schaltung benötigt bei 5 Volt einen Strom von 330 mA, wenn die Spule
konstant eingeschaltet ist. In der Realität stellt sich ein Strom von zirka 160 mA ein,
weil der Dreipunktregler die Spule mit hoher Frequenz ein- und ausschaltet.
Spule und Transistor (TIP120) sind auch nach Betriebszeiten von mehreren Stunden „Handwarm“.
Hier liegt aber der Hase im Pfeffer! Wie bereits weiter oben erwähnt wäre es besser gewesen
die Spule separat zu versorgen. Mit Sicherheit braucht dann der Transistor einen Kühlkörper.
Nun denn, das ist in die Hose gegangen…
Mit zwei Tastern kann der Arbeitspunkt des Reglers
korrigiert werden. Wenn eine Korrektur des Arbeitspunktes erforderlich ist, musst du den Magneten,
wenn er schwebt, entfernen, da die Taster mit einer Zeit von 250 Millisekunden entprellt
sind und der Regler dann nicht mehr korrekt arbeitet.
Die Zuleitungen zur Spule und
zum Hall-Effekt-Sensor sind getrennt voneinander geführt. Solltest du ein Gestell aus Holz bauen,
musst du das bei der Leitungsführung berücksichtigen.
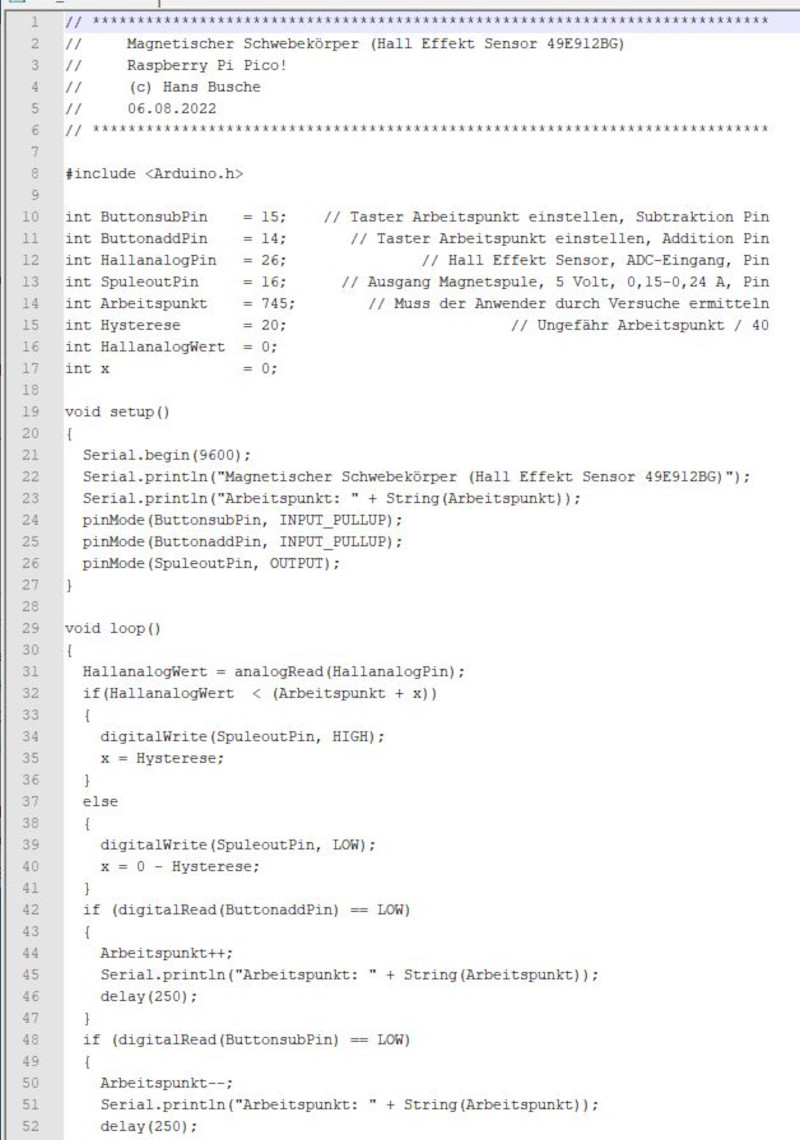

Super!! Der Raspberry Pi Pico kann mit der Arduino IDE programmiert werden!
Das obige Bild zeigt die Software. Einer der einfachsten Reglersysteme ist der Zweipunkregler.
Dieser Reglertyp kennt nur zwei Zustände: „EIN“ und „AUS“. Eine bestimmte Welligkeit,
also eine Oszillation um den Sollwert der Regelgröße muss man akzeptieren. Das hat auch
geklappt, aber nach einiger Zeit stellte sich ein Aufschwingen ein und der Magnet fiel runter.
Jetzt kommt der Dreipunktregler ins Spiel. Diese Variante kennt auch einen Ruhezustand.
Dieser wird erreicht, wenn der Istwert (Ist-Arbeitspunkt - Hall-Effekt-Sensor) nur
geringfügig vom Sollwert (Arbeitspunkt) abweicht. Dieses Verhalten der Hysterese
findest du in den Zeilen 32 bis 41.
Mit zehn Zeilen Kode ist die Software
schnell abgehakt! Jedoch um die entsprechenden Parameter zu finden, Zeile 14 und 15,
muss man einiges Ausprobieren. Ich bin ja nicht der Einzige, der an einer Magnetschwebetechnik
herumgewerkelt hat. Da gibt es richtige Experten. Jedoch auch beim Einsatz eines PID’s
müssen die Parameter wie Kp, Kd und Ki durch Versuche ermittelt werden.
Meine Vorgehensweise (Zeit, etwa vier Stunden
– mit Unterbrechungen) will ich hier kurz erläutern:
1) Den Arbeitspunkt finden:
Füge in der Software nach Zeile 31 folgende Zeilen ein:
Serial.println("Hall Sensor, ADC Wert: " + String(HallanalogWert));
digitalWrite(SpuleoutPin, HIGH);
delay(500);
Die nachfolgenden Zeilen müssen auskommentiert werden. Mit dieser Änderung wird erreicht,
dass 1) die Spule bestromt wird und 2) die Daten des Hall-Effekt-Sensors auf der
Arduino-IDE-Konsole angezeigt werden. Bewege nun den Magneten mit der Hand von unten nach
oben zum Hall-Effekt-Sensor. Sobald der Magnet leicht anfängt zur Spule zu hüpfen notiere
den Digitalwert, der auf der Konsole erscheint. Widerhole diesen Vorgang mehrmals.
Trage den ermittelten Digitalwert in Zeile 14 ein. Entferne die eingefügten Zeilen – stelle
die originale Software wieder her.
2) Den Arbeitspunkt optimieren:
Setze in Zeile 15 den Wert für die Hysterese auf null. Aktiviere jetzt die Software, so dass der
Regler arbeitet und die Spule bestromt wird. Bewege jetzt erneut den Magneten von unten nach oben
zum Hall-Effekt-Sensor. Irgendwann, im oberen Drittel verspürst du an deiner Hand ein leichtes
kribbeln! Der Magnet ist jetzt an der Position, wo der Regler hochfrequenzartig die Spule an-
bzw. ausschaltet. Durch „Handöffnung“, hier ist Feinmotorig angesagt, gib den Magneten frei.
Fällt er nach unten, so betätige die Taste Arbeitspunkt plus 1. Wird er
von der Spule angezogen, betätige die Taste Arbeitspunkt minus 1.
Setze diese Prozedur fort, bis der Magnet schwebt. Widerhole den Vorgang. Bei jeder Betätigung
der Tasten wird der Wert des Arbeitspunktes auf der Konsole ausgedruckt. Merk dir den Wert,
er muss später in Zeile 14 eingetragen werden. Schwebt der Magnet, so wird er trotzdem hin und
her springen und nach einer Zeit fällt er runter oder er wird von der Spule angezogen.
Mach eine Pause und starte diesen Vorgang erneut. Hier musst du ein gewisses Gefühl entwickeln
und irgendwann hast du den Wert für den Arbeitspunkt. Trage diesen in Zeile 14 ein. Was in dieser
Optimierungsphase bestehen bleibt, ist ein leichtes Zittern des Magneten. Wir müssen noch die
Hysterese ermitteln!
3) Den richtigen Wert für die Hysterese finden:
Setze in Zeile 15 den Wert der Hysterese auf 40. Leider musst du bei jeder Änderung in Zeile 15
das Programm neu kompilieren und auf den Pico spielen. Da hilft alles nichts. Beobachte den
Magneten, oszilliert er zur Spule verringere die Hysterese. Oszilliert der Magnet nach unten
vergrößere die Hysterese. Hast du den optimalen Wert gefunden mach eine Pause. Denk dran!
Die Temperatur hat einen Einfluss auf den Hall-Effekt-Sensor. Der
Magnetische Schwebekörper ist im optimalen Zustand, wenn er nicht mehr schwingt, er eine
Berührung mit dem Finger übersteht und ein Anpusten ihn ebenfalls nicht zum Absturz bringt.