HaBuRo4 Software Klassen Objekte
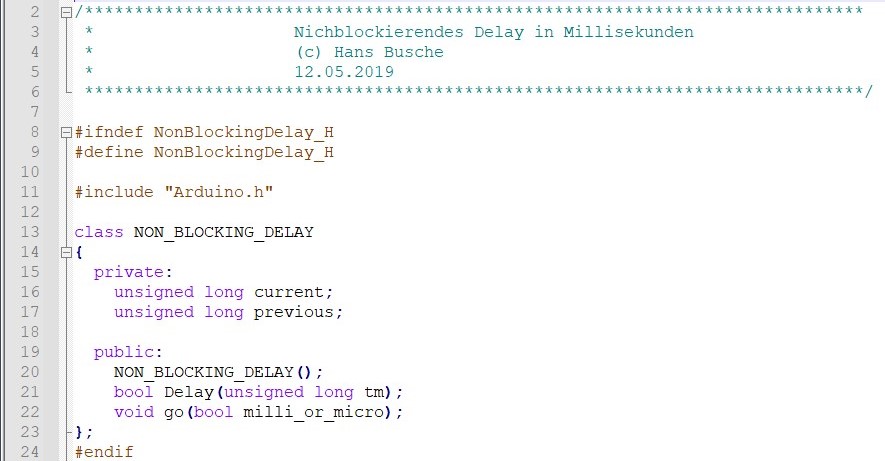
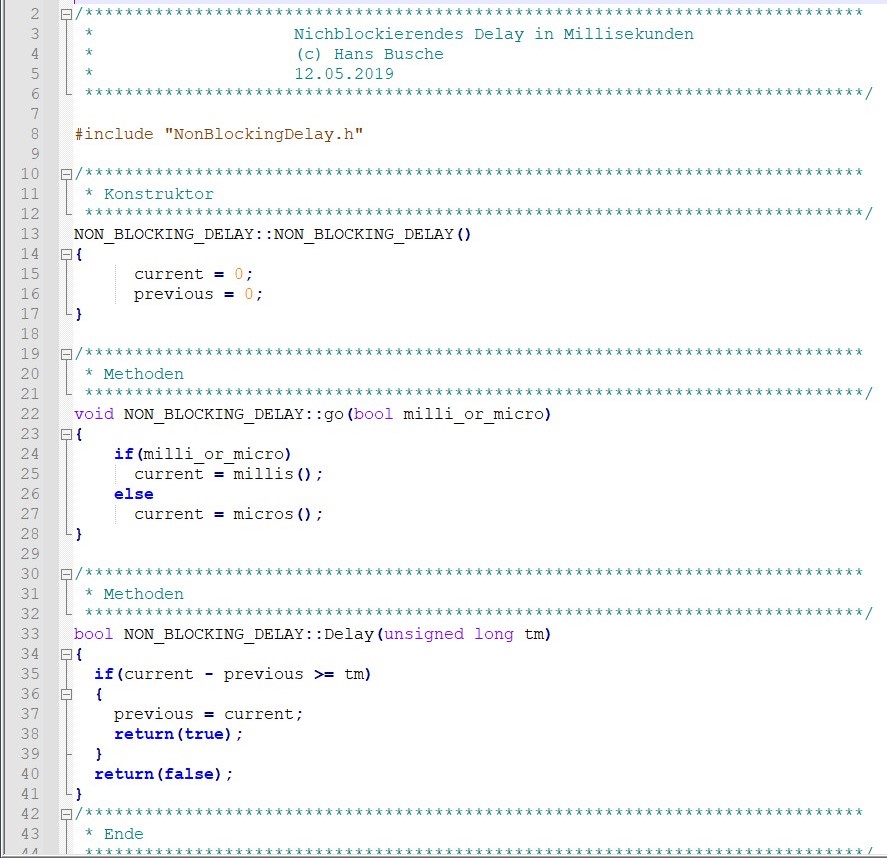
NonBlockingDelay: Header und CPP.
Ein gewöhnliches delay(xy) blockiert. Verzögerungszeiten werden aber in diesem Programm
an vielen Stellen gebraucht. Es muss etwas gebaut werden, was nicht blockiert.
Threads wäre eine Möglichkeit. Ich habe ein nichtblockierendes Delay zusammen gebastelt.
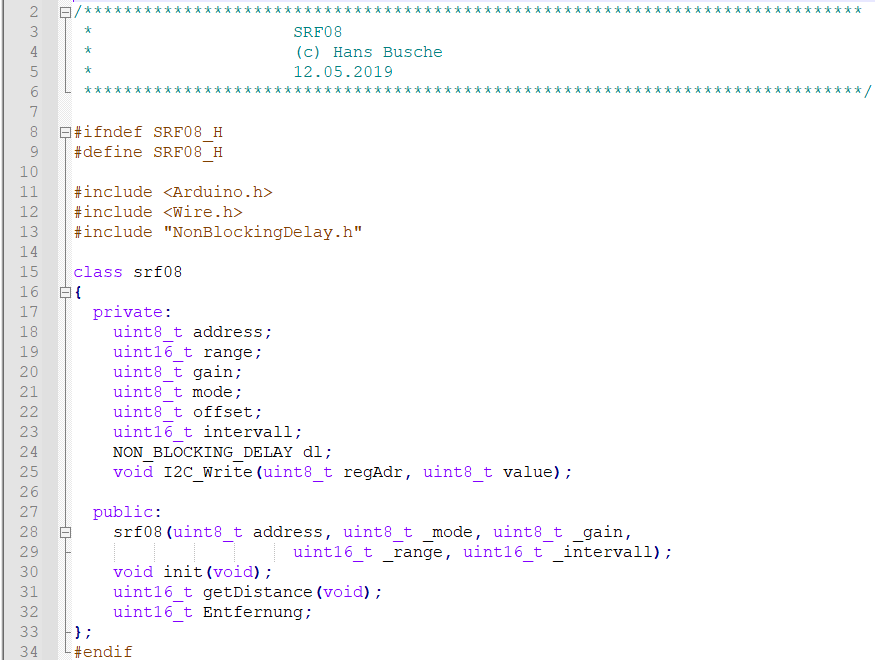
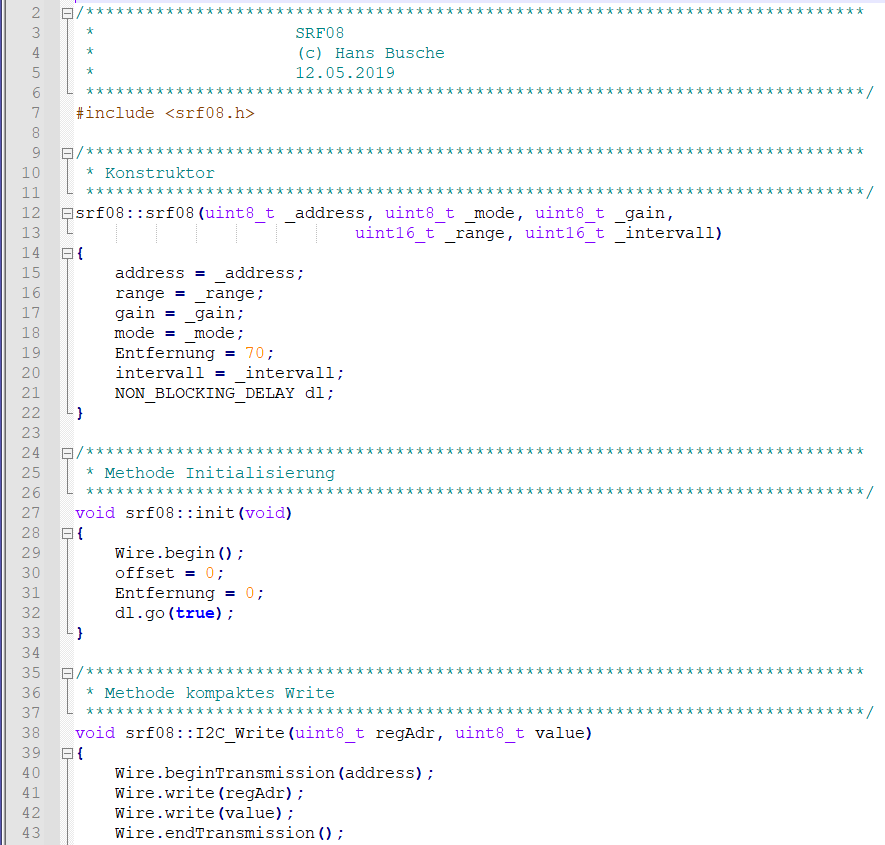
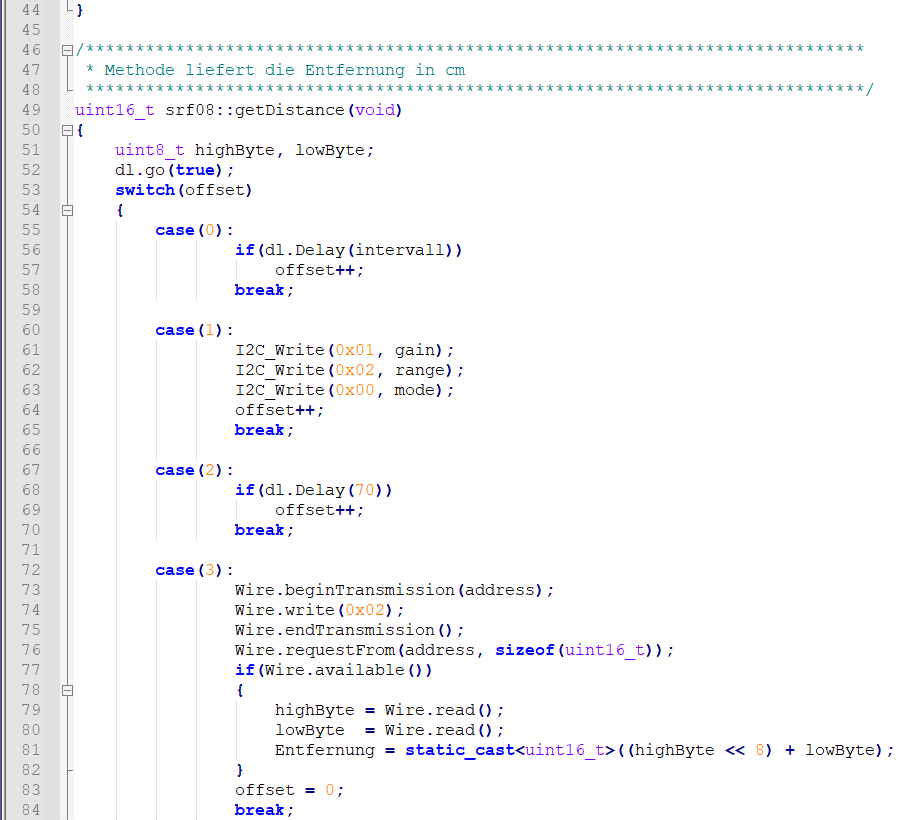
srf08, Ultraschall Entfernungssensor: Header und CPP.
Herzstück für autonomes Fahren. Leider nicht immer zuverlässig. Aber jeder technische Sachverstand
beruht auf einen Grundsatz: Hundertprozentige Sicherheit gibt es nicht.
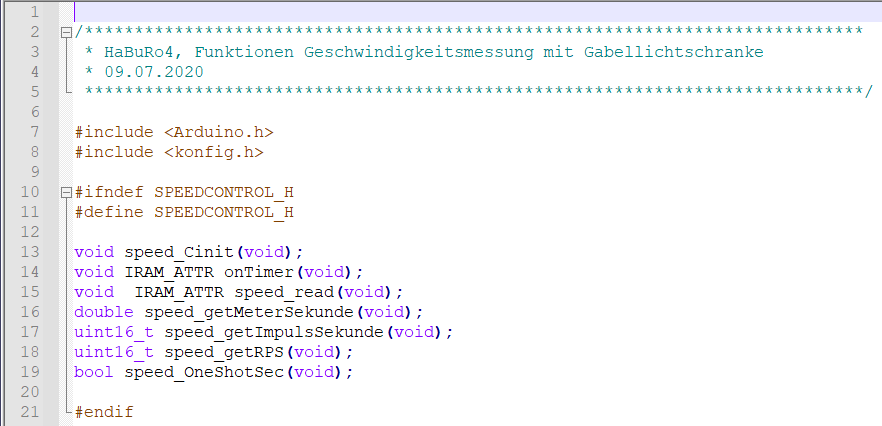
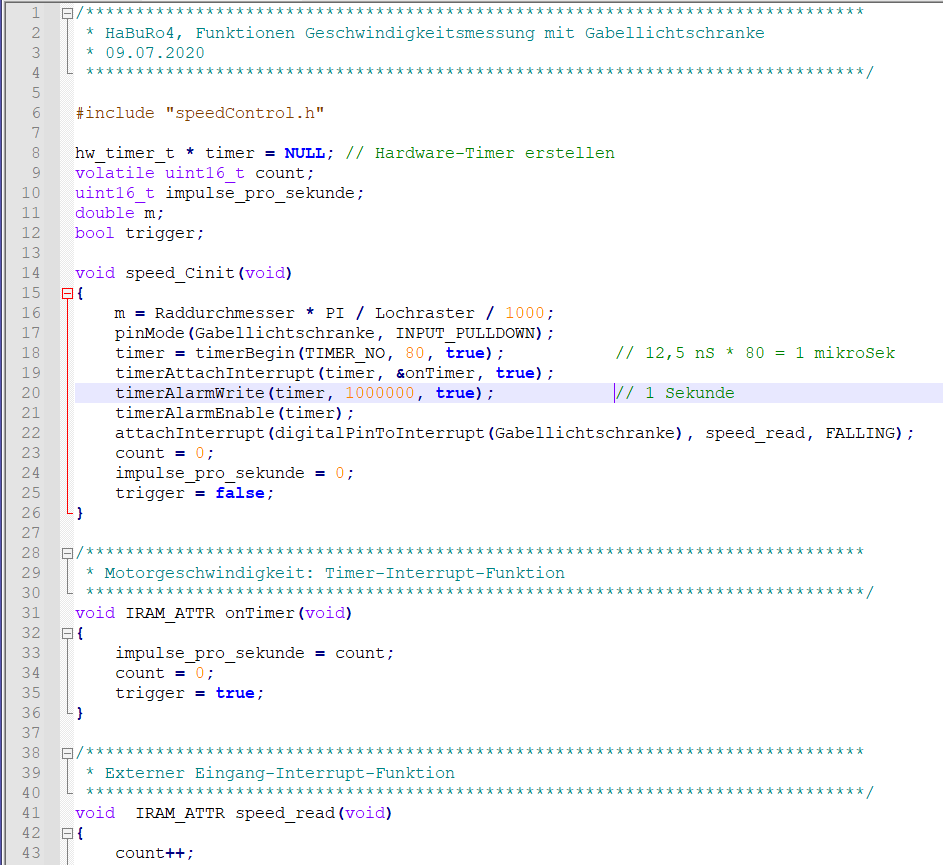
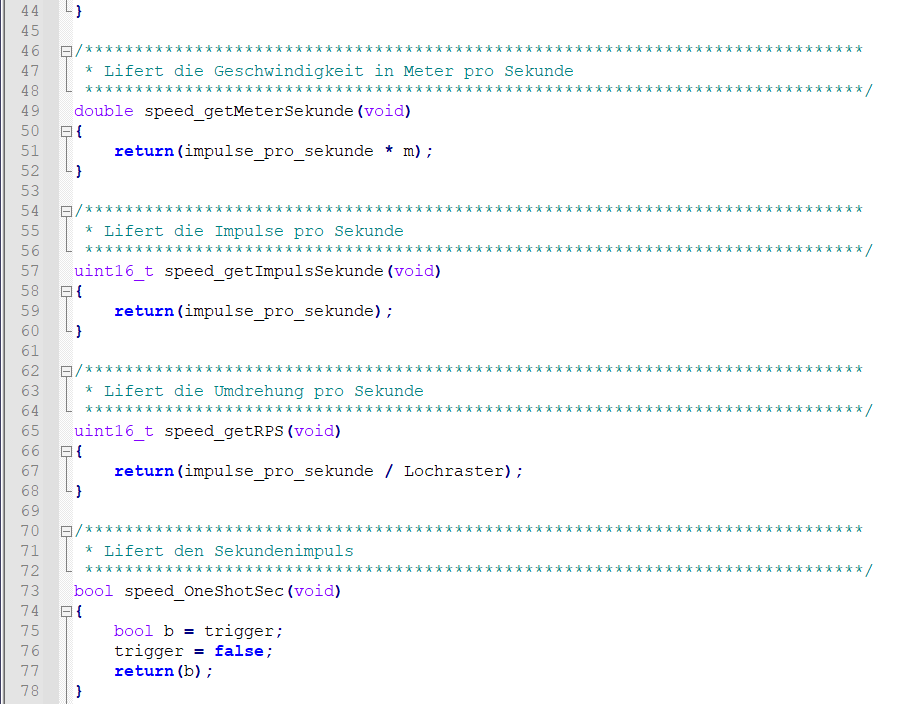
Geschwindigkeitsmessung: Header und CPP.
In einem Zeitfenster von genau einer Sekunde müssen die gelieferten Impulse der Gabellichtschranken
eingelesen werden. Das ESP32 Betriebssystem stellt hierfür zwei Funktionen zur Verfügung:
Hardware Input Interrupt (Zeile 31 bis 35) und Timer Interrupt (Zeile 41 bis 43). Der Rest ist Mathematik.