
Auto Roboter HaBuRo2
Raspberry Pi Sense Hat: Gyroskop und Kompass
GPS-Empfänger "Navilock NL-602U
 Der HaBuRo2 ist einsatbereit. Er wartet auf ein Startbefehl vom PC.
Der HaBuRo2 ist einsatbereit. Er wartet auf ein Startbefehl vom PC.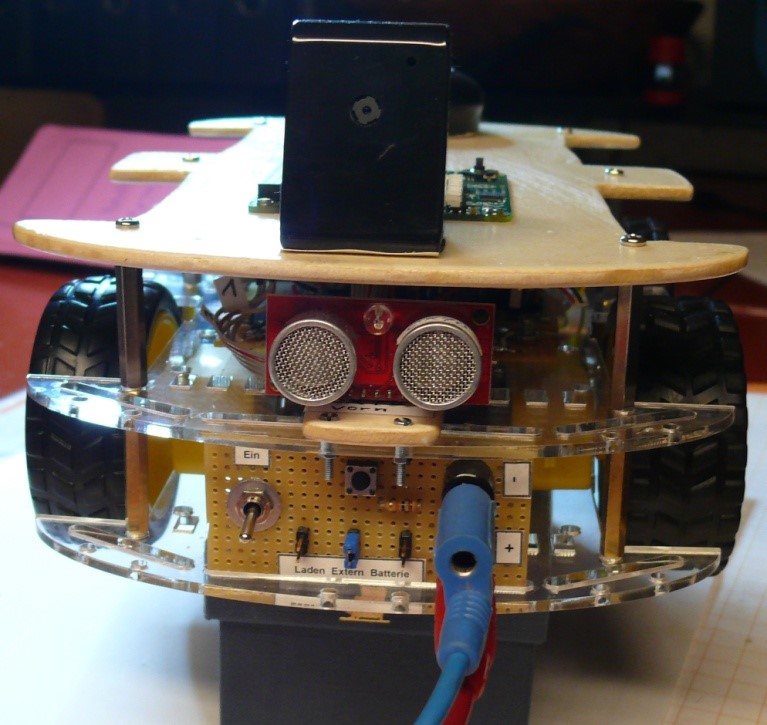 Ultraschall Entfernungsmesser, Einschalter, Resettaster und Akkuladeanschluss.
Ultraschall Entfernungsmesser, Einschalter, Resettaster und Akkuladeanschluss.
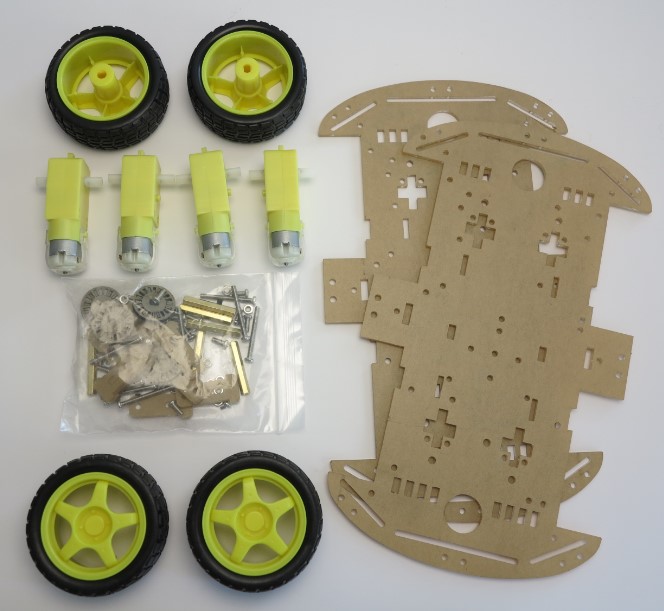 Kaufteile! Fahrwerk und Acrylglas-Chassis. China-Produktion mit guter Qualität.
Kaufteile! Fahrwerk und Acrylglas-Chassis. China-Produktion mit guter Qualität.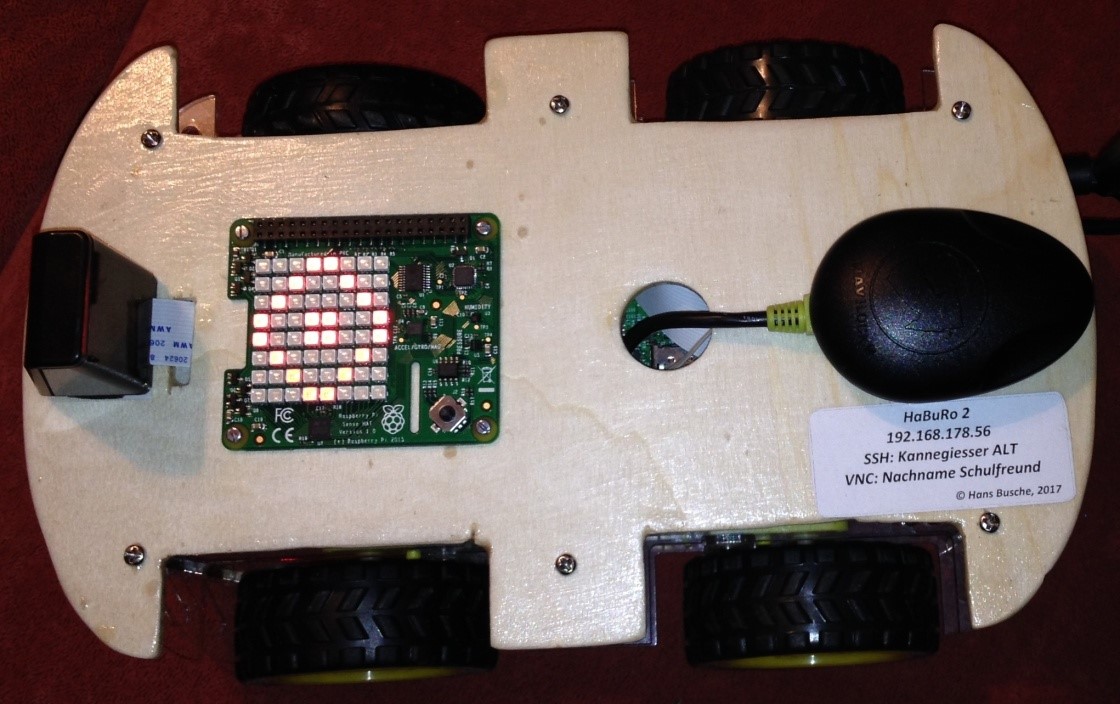 Aus einer Acrylglas-Baugruppe als Schablonenvorlage wurde eine dritte Trägerplatte aus drei Millimeter
Birkensperrholz gebaut.
Aus einer Acrylglas-Baugruppe als Schablonenvorlage wurde eine dritte Trägerplatte aus drei Millimeter
Birkensperrholz gebaut.
Der Auto Roboter HaBuRo2 besitzt vier Fahrprofile, die du wählen kannst. Nach dem Hochstart des Raspberry Pi wartet
der Roboter in einer Warteschleife auf ein Fahrkommando, welches vom Touchscreen eines Windows 10-Tablet-Pc's per
Funk kommt.
Die Kommunikation zwischen Roboter und Tablet PC erfolgt mit zwei RFM12-Radio-Modulen. Diese senden mit einer
Trägerfrequenz von 433 MHZ. Autonomes Fahren, Fahren zwischen zwei Hindernisse, Zielfahrt mittels GPS-Koordinaten
und Fahrbefehle per Tastatur sind möglich.
Weiterhin muss der Anwender eine Laufzeit in Minuten vorgeben. Während dieser Laufzeit wird automatisch
die Kamera zugeschaltet und sendet kontinuierlich einen Video Life Stream. Dieser Stream kann jedoch
nur visualisiert werden, wenn eine WLAN-Verbindung vorhanden ist.
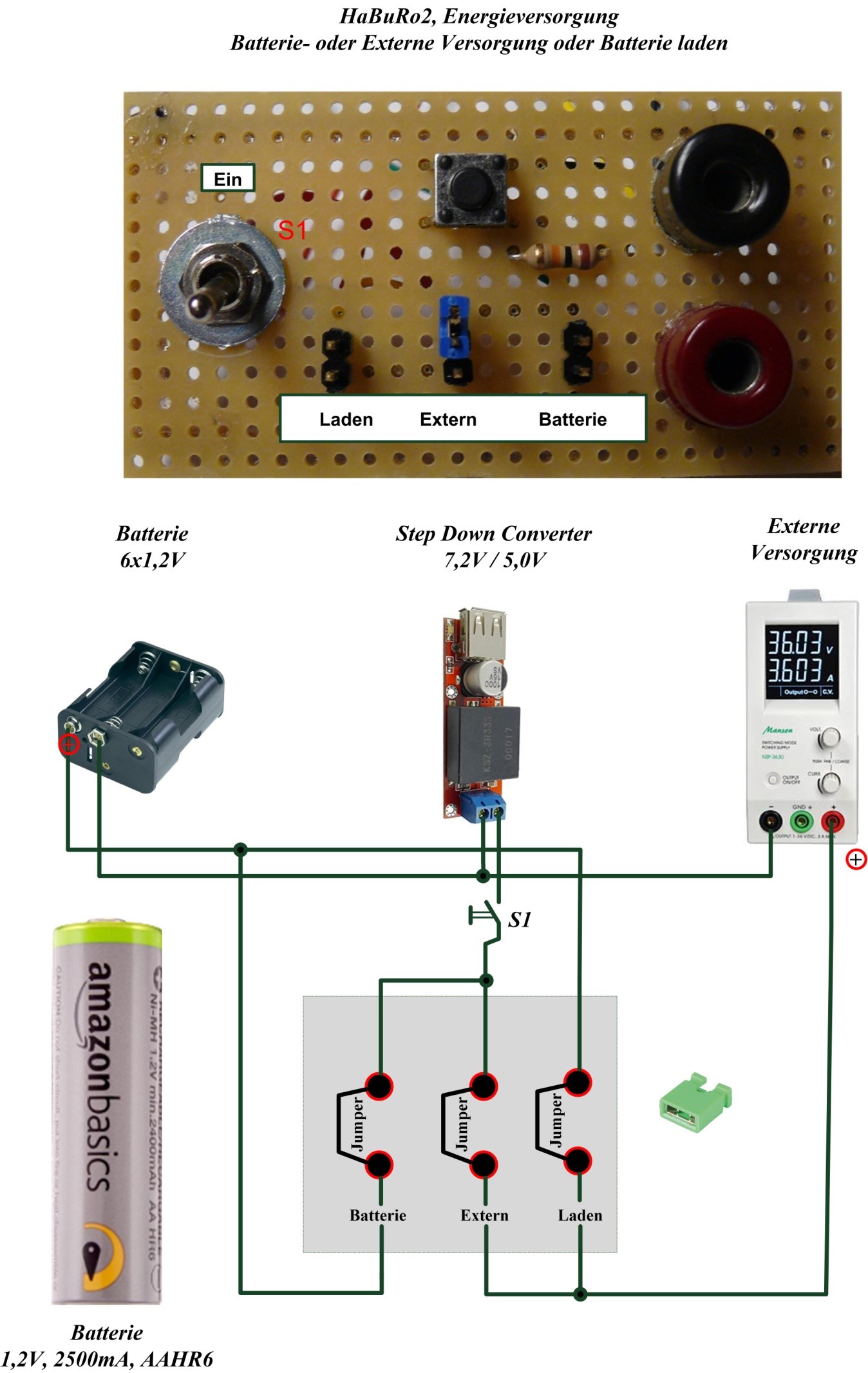
Die Stromversorgung erfolgt mit sechs Ni-MH 1,2 Volt, 2400mAh AA-Akkus. Damit kann der Roboter
maximal 45 Minuten fahren. Überwachungsmechanismen gibt es für die Stromversorgung nicht.
Die Gefahr einer Tiefenentladung der Batterien ist gegeben. Besonders anfällig sind die zwei
Ultraschall Sensoren SRF08, die bei Unterschreitung von 5 Volt sofort den Betrieb einstellen.
Einen softwaretechnischen Abfangjäger gibt es hierfür nicht. Kann man aber implementieren.
Die Frontseite des Roboters besitzt eine Serviceplatine. Hier kann man mittels Jumper wählen,
ob die Stromversorgung von der Batterie- oder vom externen Netzteil kommen soll. Weiterhin ist
eine Vorrichtung vorhanden, die ein Laden der Batterie erlaubt, ohne den Roboter zu demontieren.
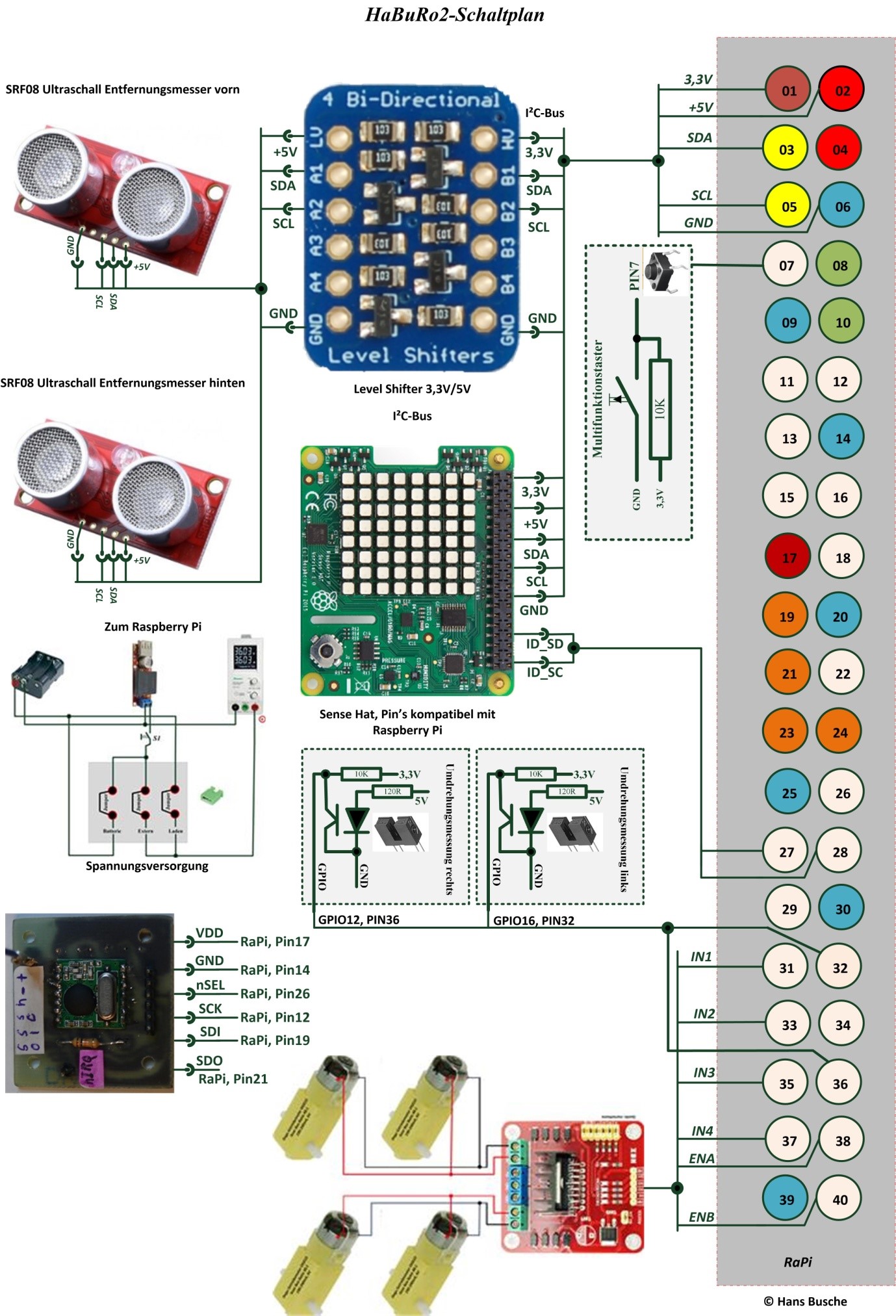
Aufgebaut ist der Roboter wie ein Sandwich. 1) Unterteil, mit Antrieb, Motorelektronik, Batteriepack und
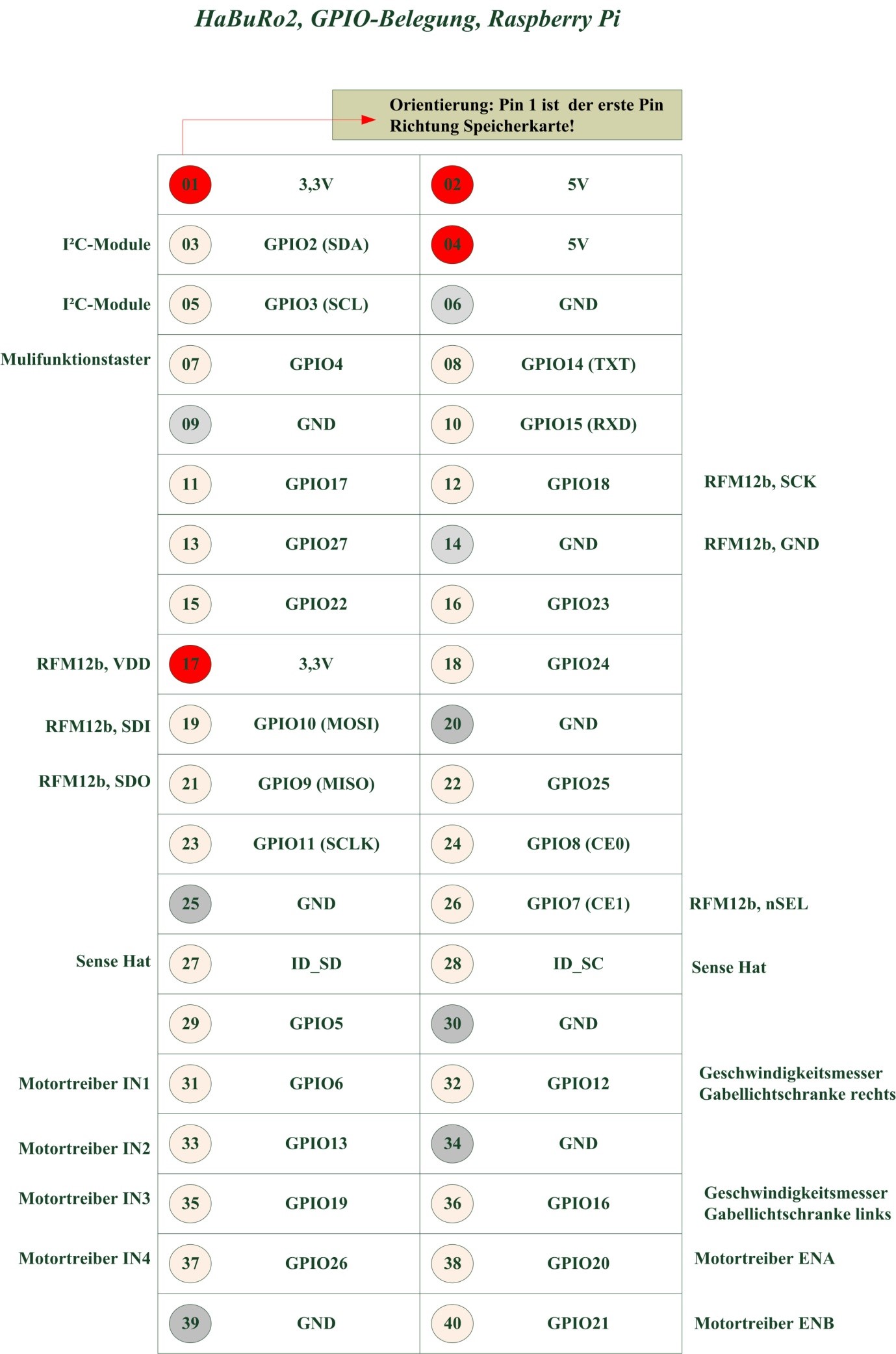
Spannung-Stepp-Down-Konverter von 7,2 Volt auf 5 Volt. 2) Mittelteil, mit Raspberry Pi,
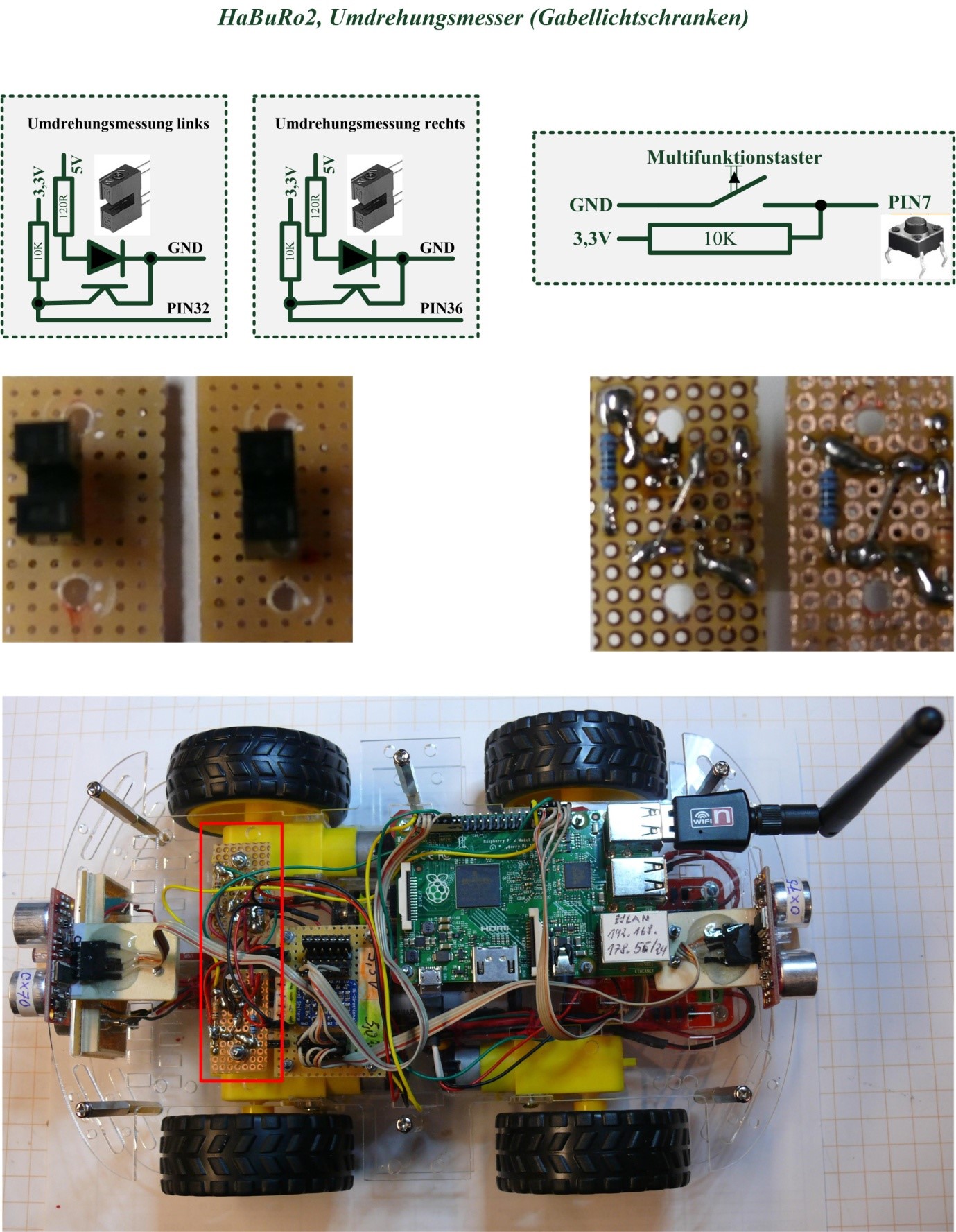
Ultraschall Sensoren SRF08, Levelshifter für den I²C-Bus und Gabellichtschranken für die
Umdrehungskontrolle. 3) Oberteil, mit Kamera, Sense Hat, RFM12-Radio und den GPS-Empfänger.