Roboter HaBuRo2 GPS
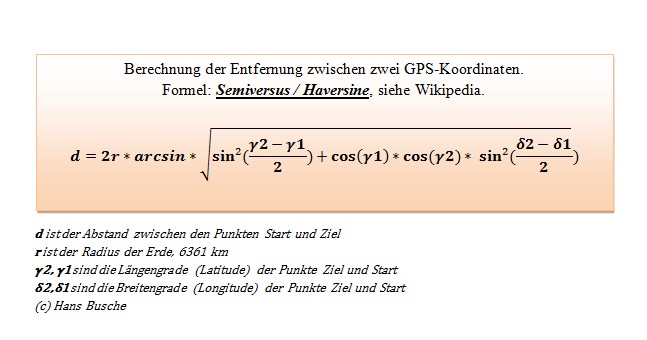
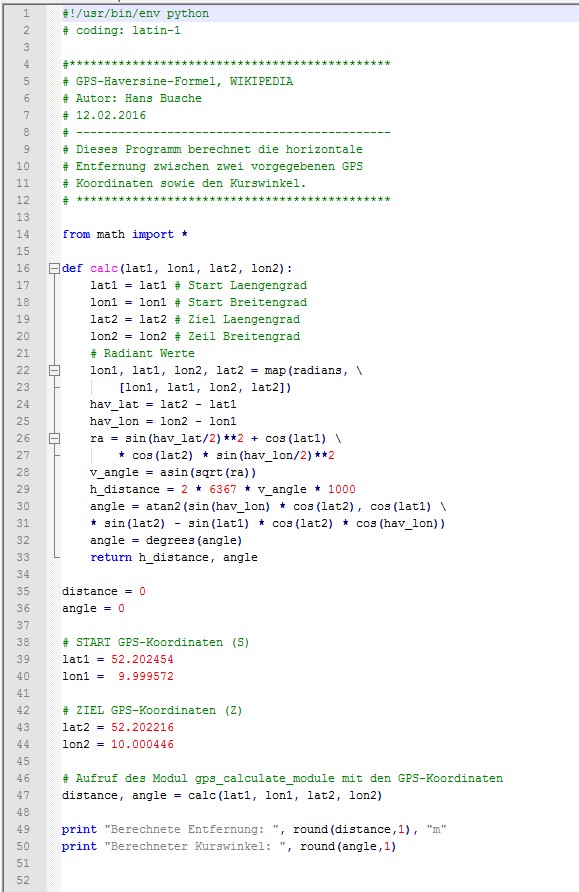
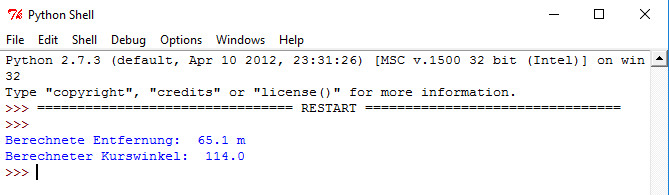
Python-Algorithmus zum Berechnen der Distanz und Kurswinkel
GPS-Empfänger "Navilock NL-602U"
GPS-Empfänger "Navilock NL-602U"

 Testfahrt auf einem Sportplatz. Start und Ziel wurde zuerst mittels "Google-Earth" ausgemessen.
Anschließend wurden dann die Werte dem Roboter gesendet. Mit den Start- und Zielkoordinaten berechnet
die Pthon-Software den Kurswinkel und die Distanz. Theorie und Praxis stimmen in etwa überein.
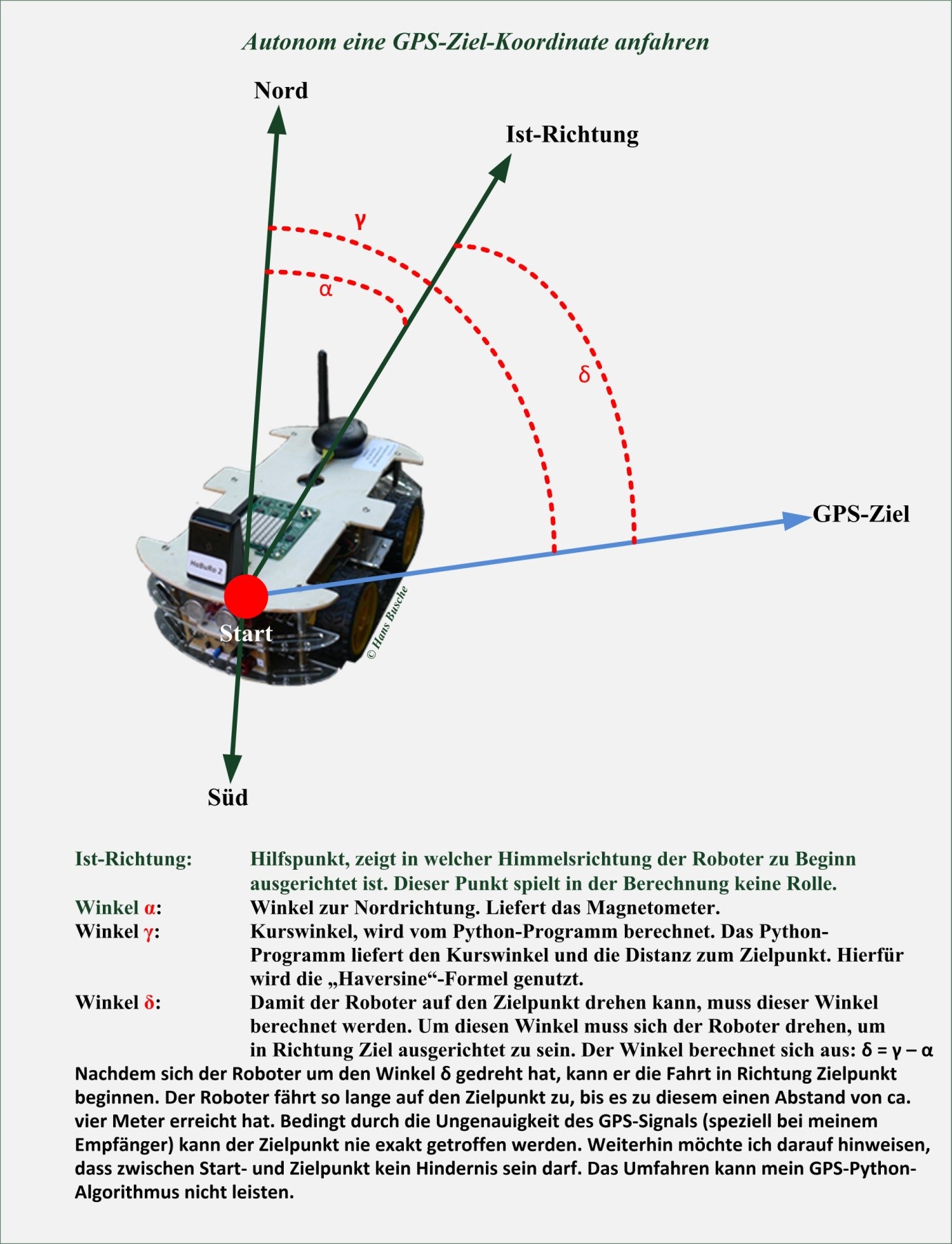
Zuerst hat sich der Roboter durch Drehen auf der Stelle auf den Kurswinkel von 114° ausgerichtet.
Anschließend wurde dann eine Entfernung von 65,1 Meter gefahren.
Testfahrt auf einem Sportplatz. Start und Ziel wurde zuerst mittels "Google-Earth" ausgemessen.
Anschließend wurden dann die Werte dem Roboter gesendet. Mit den Start- und Zielkoordinaten berechnet
die Pthon-Software den Kurswinkel und die Distanz. Theorie und Praxis stimmen in etwa überein.
Zuerst hat sich der Roboter durch Drehen auf der Stelle auf den Kurswinkel von 114° ausgerichtet.
Anschließend wurde dann eine Entfernung von 65,1 Meter gefahren.
Der GPS-Empfänger "Navilock NL-602U" wird vom Raspberry Pi Linux Betriebssystem Raspbian erkannt und
bietet eine gute Empfangsleistung. Die notwendigen GPS-Programme wie die Python-Bibliotheken,
der gpsd-Daemon-Server sowie das xGPS-Programm installierst du mit dem folgenden Befehl auf den Raspberry Pi:
sudo apt-get install gpsd gpsd-clients python-gps
Python benötigt einen GPSD-Dienst (Daemon) im Hintergrund. Bevor man Python Programme mit GPS-Bibliotheken
startet, muss man in einem Terminal-Fenster den gpsd-Dienst starten:
sudo gpsd -b /dev/ttyUSB0 -F /var/run/gpsd.sock -G
Vorher solltest du einen Funktionstest des GPS-Empfängers durchführen.
Stecke den "Navi-lock NL-602U" an einen USB-Port und starte das Programm "xgps" im Terminal-Fenster.
Es wird auf der grafischen Oberfläche ein Fenster geöffnet und eine Grafik visualisiert die empfangenen
Satelliten. Das kann anfangs mehrere Minuten dauern. Beschleunigt wird dieser Vorgang, wenn man das Starten im Freien durchführt.
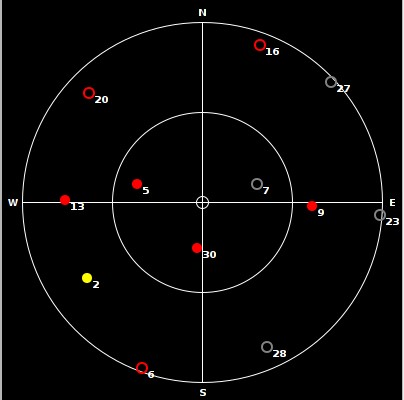
Du siehst in "xgps" verschiedene Informationen der empfangenen GPS-Daten (Bild oben links).
Die einzelnen Satelliten, die empfangen werden, sind durch farbige Punkte auf der Radaransicht hervorgehoben.
xgps zeigt dir alle für die Navigation relevanten Informationen der aktuellen Position (Längen- und Breitengrad) an.
Du kannst auch ablesen, wie schnell sich dein Roboter-Auto bewegt oder wie viel Meter über den Meeresspiegel
sich die aktuelle Position befindet.
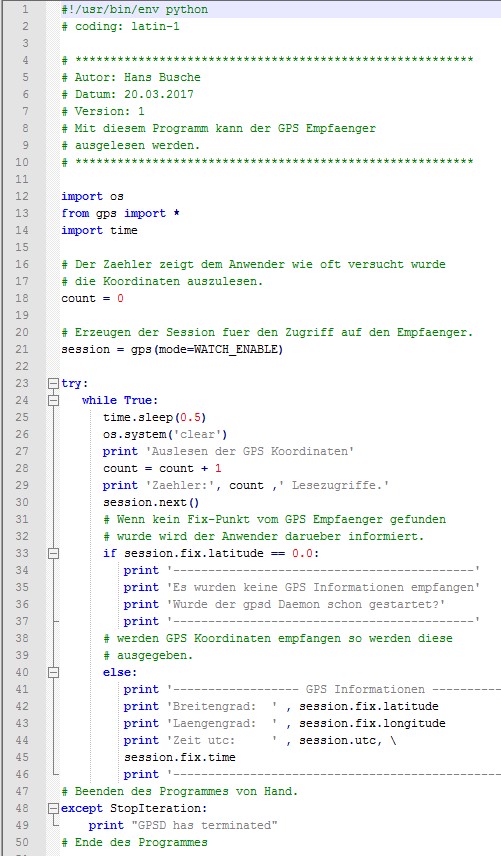
GPS Empfänger auslesen