MicroPython Skript MCP3551
Das Skript „PT100.py“ besteht aus zwei Klassen. „spiMCP3551.py“, behandelt den SPI-Bus zum
Mikrocontroller Pico und „pt100_MCP3551.py“ kontaktiert den PT100, wobei diese Klasse die
Funktionalität von „spiMCP3551.py“ erbt. „PT100.py“ ist so konstruiert, dass mehrere PT100
Sensoren integriert werden können, weil Chip Select (CS) übergeben wird.
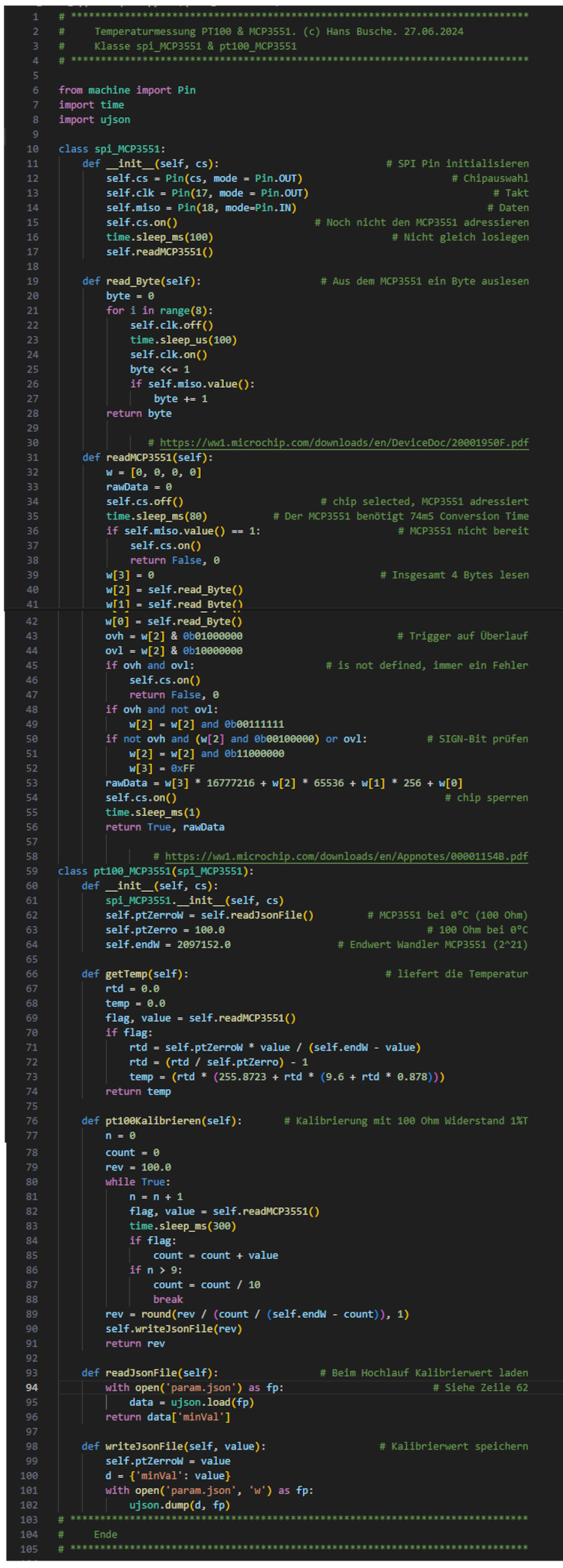
Einmalig muss jeder PT100 kalibriert werden. Das passiert in den Zeilen 76 bis 91. Der digitale
Wandler Wert für Null Grad Celsius wird in eine JSON-Datei archiviert, Zeile 98 bis 102.
Im normalen Betrieb erfolgt das Einlesen der Kalibrierdaten in der Initialisierungsphase beim
Hochlauf der Klasse, Zeile 62. In Abhängigkeit einer Zeitschleife, die man in der main.py basteln
muss, wird mit „getTemp“ die Temperatur gelesen. Der oben abgebildete Quellenkode ist kommentiert,
dass muss hier nicht noch Einmal passieren.