Katie
Der Laufmechanismus basiert auf dem Prinzip des Gestänges und des Kurbelmechanismus.
Vorder- und Hinterbeine bewegen sich hin und her und die Mittelbeine bewegen sich auf
und ab – eine parallele oszillierende Bewegung - so bewegt sich Katie.
Mit drei 1,5Volt AAA-Batterien kann Katie neuneinhalb Stunden krabbeln. Auf dem
Fußboden im Wohnzimmer krabbelt Katie lustig dahin. Geradeaus läuft sie nicht,
sie macht immer eine leichte Linkskurve. In den Abendstunden und mit den blauen
Leuchtdioden sieht das richtig urig aus. Ganz besonders gefallen mir die Geräusche
der sechs Beine, in Verbindung mit dem Getriebemotor. Motoren und Bewegung - ich liebe es!
Kopf und Bauch von Katie bestehen aus Draht. Wie man aus einer Rolle Draht gerade
Drahtstangen herstellt erfährst du hier.
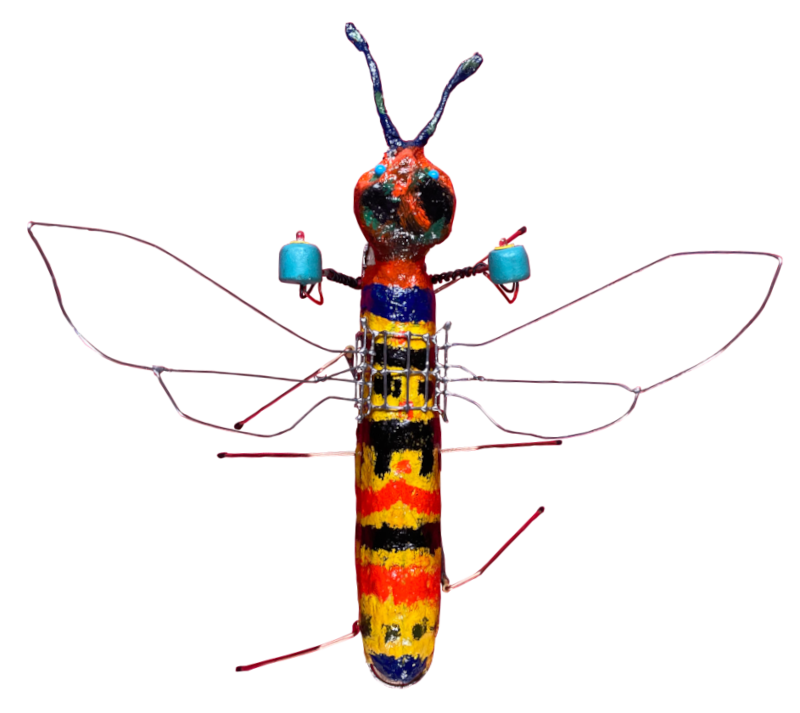
Damit Katie zu mindestens etwas aussieht wie eine Hornisse wurde ein Flügelpaar integriert.
Die Flügel werden auf den Rücken von Katie aufgesteckt. Dadurch lässt sich die „Hornisse“
leichter und sicherer transportieren. Die Augen bestehen aus Stecknadeln mit Plastikkopf.
Die fehlen jetzt im Nähkasten meiner Frau. Noch hat sie das nicht gemerkt!
Mehr Details siehe hier!
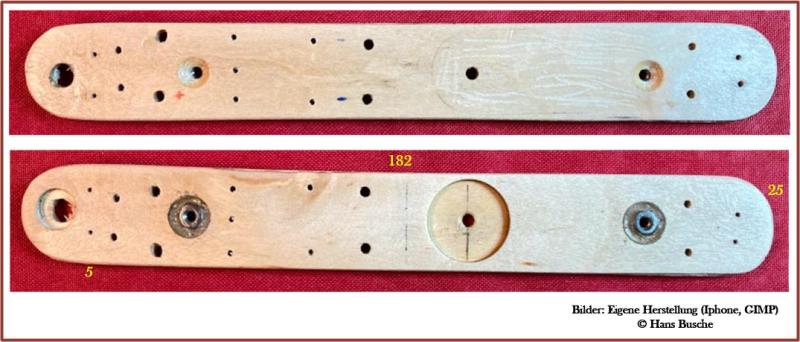
Es wird auf engstem Raum viel gebohrt. Das Holzchassis sollte aus Buchenholz sein.
Es gibt 200x24x2,5 Brettchen in Form eines Eisstiels. Wenn du Eisstiel-Brettchen
ergattern kannst, dann brauchst du zwei Stück. Sie werden übereinander verleimt.
Die Dicke muss fünf Millimeter sein. Zur Bearbeitung muss das Brettchen
komplett mit Kreppband abgeklebt werden.

Mehr Details siehe hier!
Den Motor
musst du höchstwahrscheinlich kaufen. Weiterhin sind die beiden Stromanschlüsse sehr fragil.
Du musst die Anschlussdrähte unbedingt zugentlasten. Die Verbindung Motorwelle zur Drehkurbel muss
trapezförmig gefeilt werden. Eine Elektriker-Dosenklemme sorgt für den festen Halt und ist
jederzeit erneuerbar.
Mehr Details siehe hier!
Und hier kannst du Hilfsmittel sehen!
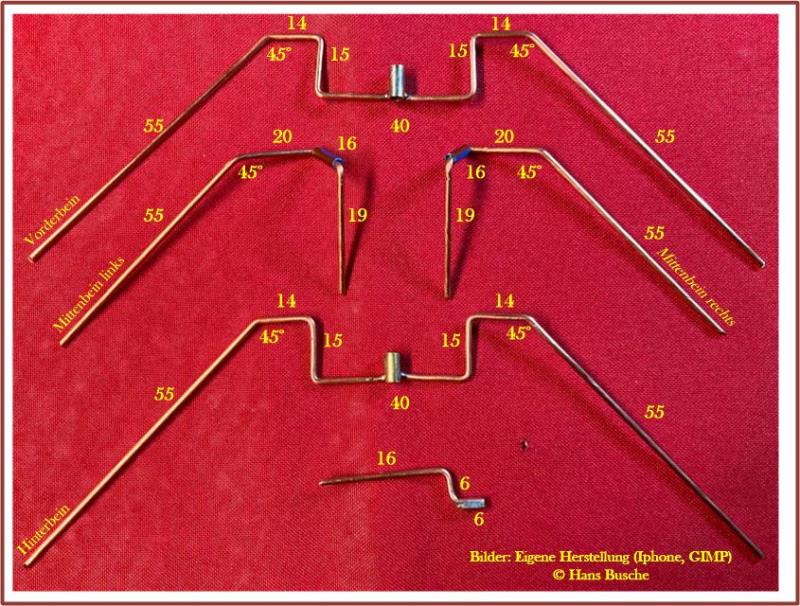
Die sechs Beine und die Motor-Drehkurbel bestehen aus 2,5 Quadratmillimeter Kupferdraht.
Unter dem Namen „NYM4x2,5-Feuchtraumkabel“ bekommt man Reste vom Elektromeister.
Der Kunststoffmantel wird entfernt und die vier Adern werden abisoliert.
Ein Teil der Abisolierung der Einzeladern werden als Abstandshalter noch benötigt!
Jetzt müssen die vier Drähte noch als gerade Stange ausgerichtet werden.
Mit einem Akkuschrauber werden sie verdrillt. Diesen Prozess habe ich schon
zum Projekt „Kugelbahn“ erläutert. Eine gute Videodokumentation findest du
hier.
Hier nun eine kurze Beschreibung, wie ich die Beine gefertigt habe:
Ein Montagebrett habe ich mit Kreppband angeklebt. Auf das Kreppband habe
ich die Form der Beine maßgenau aufgezeichnet. Mit Hilfe einer Flachzange
und Seitenschneider den Kupferdraht ebenfalls auf das Kreppband nach Zeichnung
ausgerichtet. Jeweils ein Messingröhrchen als Drehlager angelötet. Anschließend
alle Teile mit Stahlwolle auf Hochglanz gebracht.

Mehr Details siehe hier!
Die vier Verbinder zu den Beinen werden aus ein-Quadratmillimeter Eisendraht gefertigt.
Hier ist Kupfer nicht so ideal, da man die kleinen Ösen nicht so exakt biegen kann.
Als Schablone dient ein Stahlnagel. Die Ösen werden mit den Drahtenden verlötet.
Nutze auch hier ein Montagebrett mit Kreppband abgeklebt und zeichne jeden Verbinder
vorher auf das Kreppband auf. Fixiere Eisendraht und Öse und verlöte beides miteinander.
Anschließend alle Teile mit Stahlwolle reinigen. Denk daran! Die Verbinder sind das
Herzstück des Roboters und tragen die größte Belastung. Auch hier werden die Drähte
vorher zu einer geraden Stange mit dem Akkuschrauber verdrillt.
Mehr Details siehe hier!
Und hier kannst du Hilfsmittel sehen!
Die zwei Mittenbeine: Sie haben ein 15mm Messingröhrchen (Innendurchmesser 3mm)
als waagerechtes Drehlager. Diese sind seitlich am Holzchassis mit Heißkleber verklebt.
Vorder- und Hinterbein: Sie haben ein 7mm Messingröhrchen (Innendurchmesser 3mm) als senkrechtes Drehlager.
Diese sind vorn und hinten auf dem Holzchassis mit einer 3mm Gewindeschraube plus Mutter verschraubt.
Weiterhin ist der Getriebemotor auf das Holzchassis mit Heißkleber verklebt. Es reicht ganz wenig Heißkleber!
Provisorisch ist der Motor bereits mit Anschlussdrähten verlötet, plus Zugentlastung. Nach jedem
eingesetzten Verbinder ist ein Testlauf notwendig.
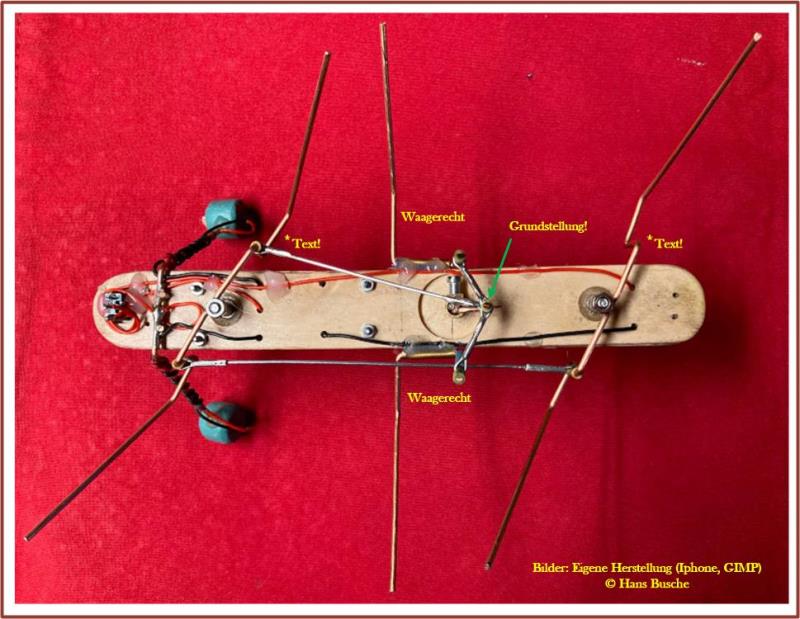
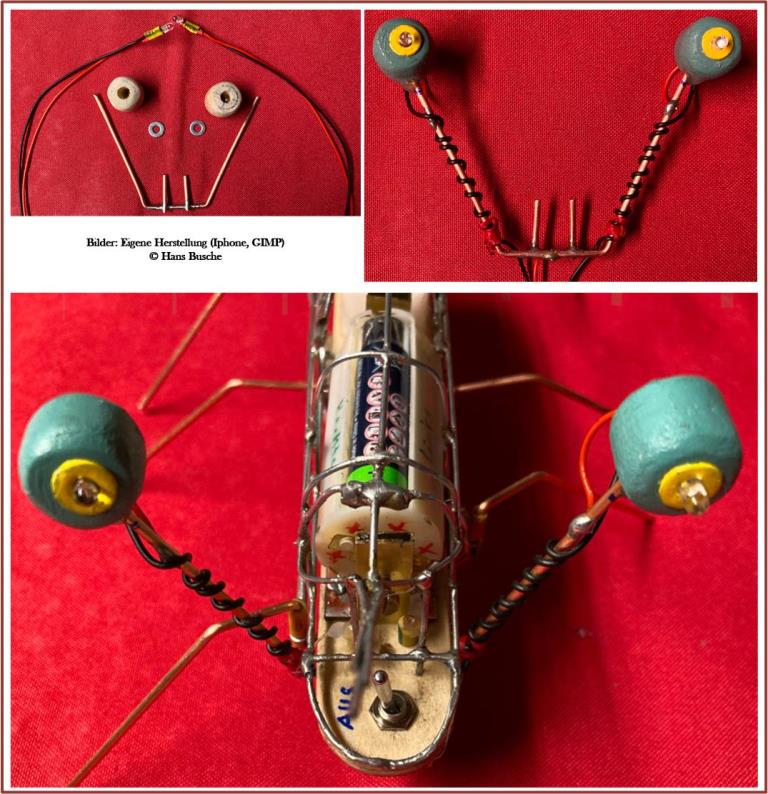
Das obige Bild zeigt die „Sechs-Bein-Mechanik“
in Grundstellung: Würde man Katie jetzt auf die Füße stellen, dann sind die zwei Mittenbeine
genau waagerecht zueinander und berühren beide den Boden. Vorder- und Hinterbein berühren auch den
Boden sind aber schon in einem Schritt-Modus. Schau dir das obige Bild genau an und vergleiche es
mit dem ersten Bild dieser Seite, dann wird die Sache etwas klarer.
Die h-förmig gebogene Motorwelle ist exakt nach rechts Mitte Holzchassis ausgerichtet.
Siehe Bild. Als erstes wird der Verbinder zwischen Vorder- und Hinterbein eingebaut.
Vorder- und Hinterbein genau parallel zum Holzchassis ausrichten. Verbinder einbauen
und mit Kunststoffröhrchen (vom „NYM4x2,5-Feuchtraumkabel“, wie bereits oben beschrieben)
waagerecht ausrichten. Die Kunststoffröhrchen kann man jederzeit aus- und einbauen,
das ist kein Problem. Als zweites wird der Verbinder zum Mittenbein oben eingebaut.
Mittels Kunststoffröhrchen wird der Verbinder waagerecht ausgerichtet.
Danach einen Testlauf durchführen. Anschließend den Verbinder zum Vorderbein einbauen.
Hier muss einiges beachtet werden: Vorderbein (Hinterbein folgt dem Vorderbein durch den
ersten eingebauten Verbinder) so nach rechts drehen, dass es keinen Konflikt mit dem
Mittenbein gibt und keine Berührung mit dem Holzchassis. Weiterhin darf der Verbinder
Vorder- mit Hinterbein nicht das untere Mittenbein berühren. Auch hier den Verbinder
mit Kunststoffröhrchen waagerecht ausrichten. Testlauf durchführen.
Zum Schluss kommt der letzte vierte Verbinder ins Spiel. Er wird von der Motorwelle
zum unteren Mittenbein eingebaut und mit Kunststoffröhrchen waagerecht fixiert.
Testlauf durchführen.
Diese
Leuchtdioden wurden verbaut! Pluspol der 4,5 Volt Spannungsversorgung wurde mit dem Drahtkorpus verbunden.
Ein Widerstand von 330Ω liegt in Reihe mit dem Minuspol. Die blaue LED besitzt eine hohe Leuchtkraft,
du kannst auch ein Kiloohm verwenden. Der nachfolgende Schaltplan zeigt einen anderen Weg, geht aber auch.
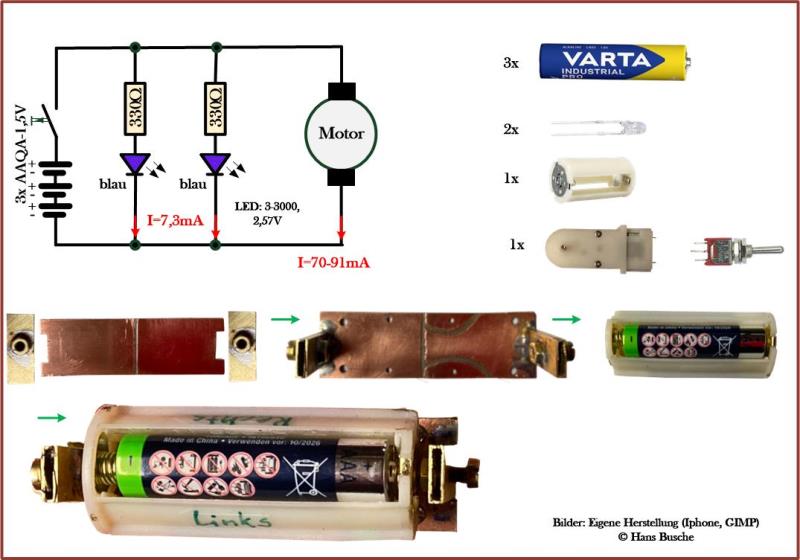
Der preiswerteste Weg einen Batteriehalter für drei AAA-Batterien zu bekommen ist, eine
Taschenlampe im Ein-Euro-Shop zu kaufen. Im Internet wird dieser Halter für das dreifache
Geld angeboten plus Versandkosten!