Bürstenloser Motor einer Festplatte im Zusammenspiel mit dem Treiber MCP8063.
Der MCP8063 von Microchip hat eine Fläche von nur 5x5 Millimeter mit acht Anschlüssen.
Der
MCP8063
ist ein dreiphasiger bürstenloser Motortreiber mit Sinuswellenantrieb.
Weiterhin kommt er ohne HALL-Sensoren aus. Der Sinuswellenantrieb dreht den Rotor,
indem er die Spannung der Statorspule kontinuierlich sinusförmig in Übereinstimmung
mit dem Rotationswinkel des Rotors ändert. Die drei Phasen für den Motor werden je nach
Frequenz um eine bestimmte Zeit verzögert angesteuert.
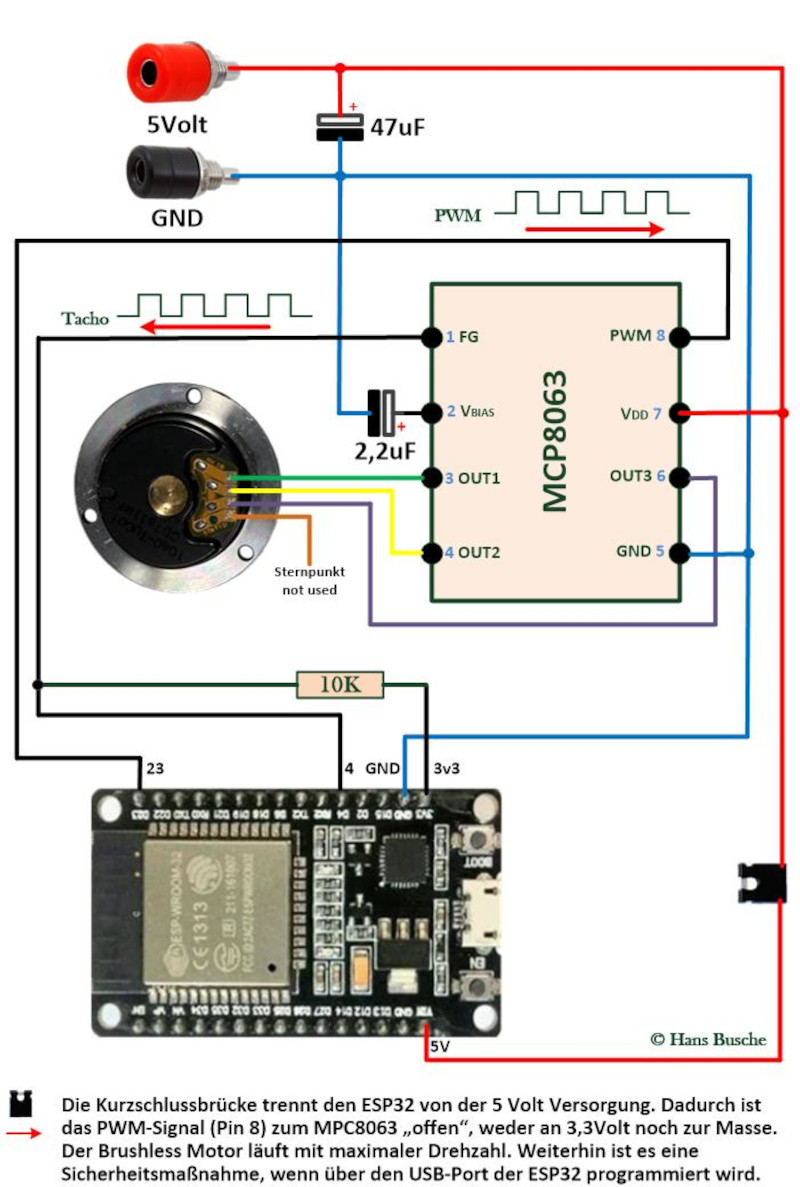
Die Drehzahl des Motors kann gesteuert werden entweder durch das digitale PWM-Eingangssignal
oder durch Variieren der Stromversorgung (VDD). Wenn das PWM-Signal
High ist (oder offengelassen wird), dreht der Motor mit voller Drehzahl.
Wenn das PWM-Signal „Low“ ist, wird der Motor gestoppt.
Pin 1 (FG) ist ein „Hall-Sensor-Äquivalent“ digitaler Ausgang,
der Geschwindigkeit-Informationen zum ESP32 liefert.
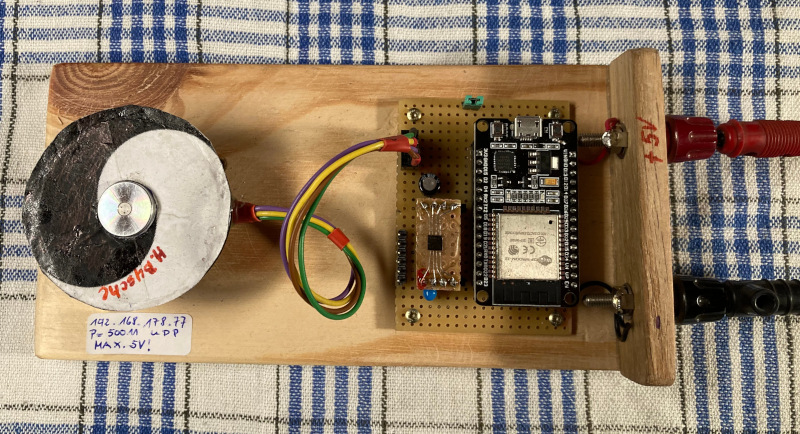
Das obige Bild zeigt den Versuchsaufbau. Spannungsversorgung 5 Volt, Strom bei maximaler
Geschwindigkeit 380 mA.
Bis auf den MPC8063
(März 2022, 1,5 Euro)
hatte ich alle Bauteile in meiner Bastelkiste.
Der ESP32 Mikrokontroller ist steckbar, so dass ich ihn immer in anderen Projekten verwenden kann.
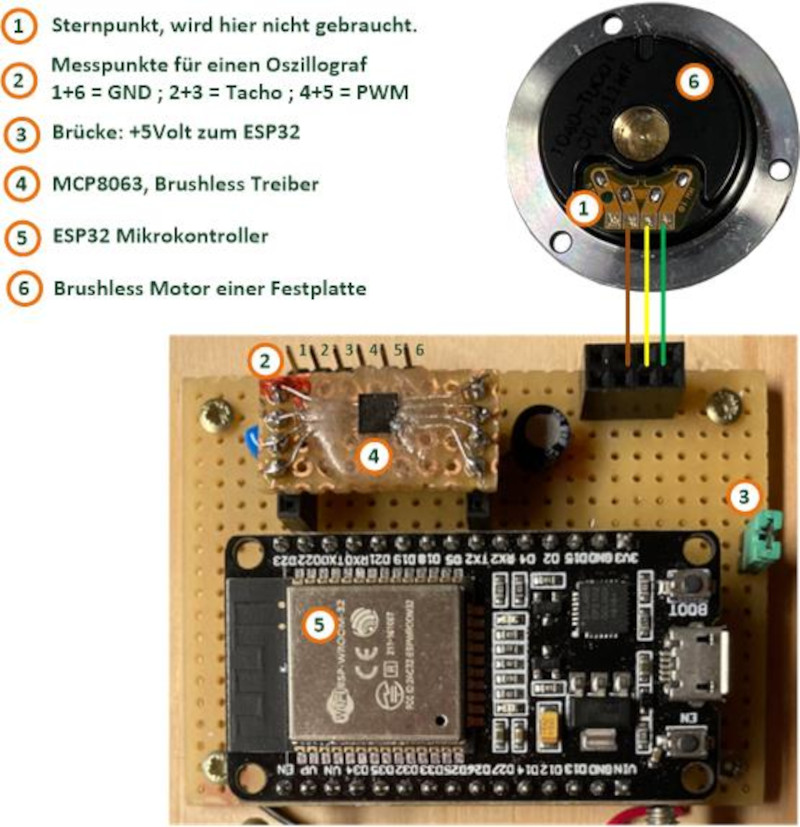
Hinweis zum Festplatten Brushless Motor! Der Anschluss für den Sternpunkt (Common)
wird bei einer Ansteuerung mit dem Treiber MCP8063 nicht benötigt!
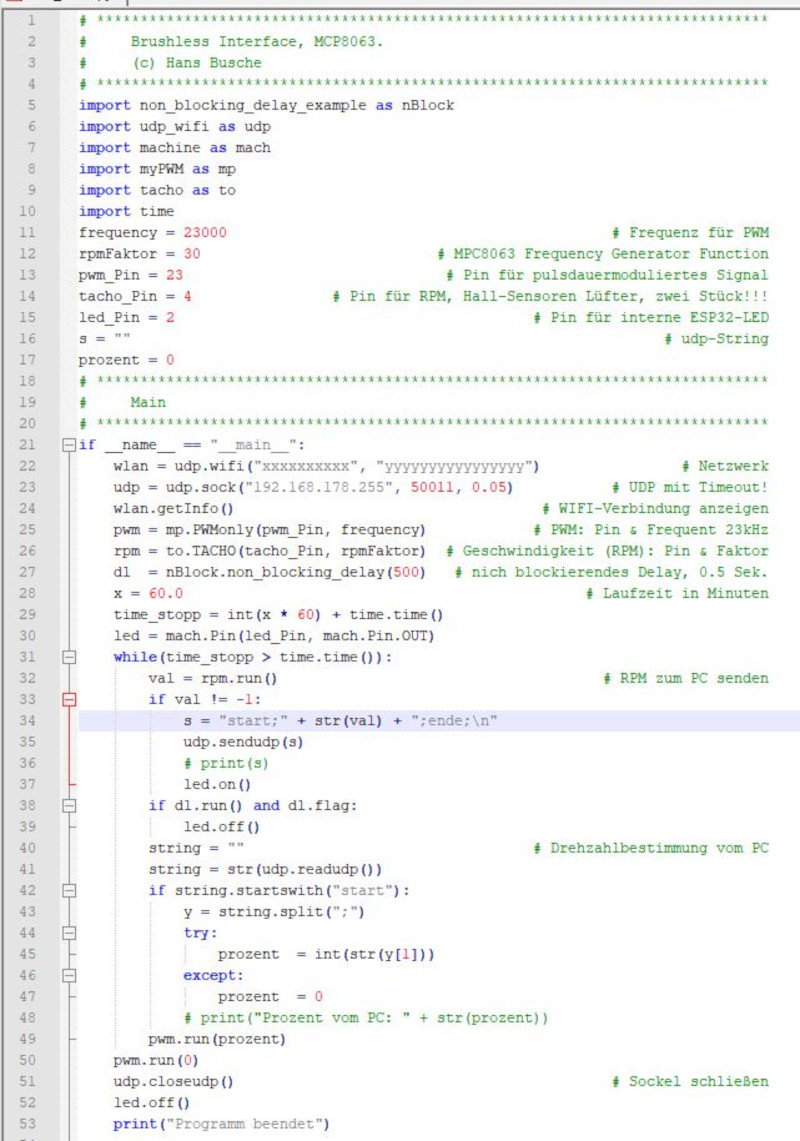
Die Import Bibliotheken wie pwm, udp_wifi und non_blocking_delay werden separat gezeigt,
siehe
Menüleiste.
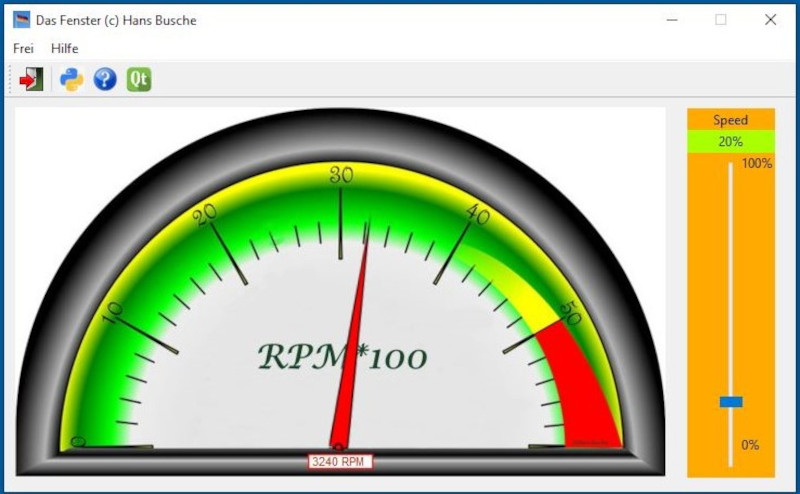
Eine PC Python Applikation (GUI mit PyQt6) visualisiert den Versuchsaufbau.
Der Quellentext dieser Anwendung kann hier nicht gezeigt werden.
Ich habe hierfür nicht genug Speicherplatz.
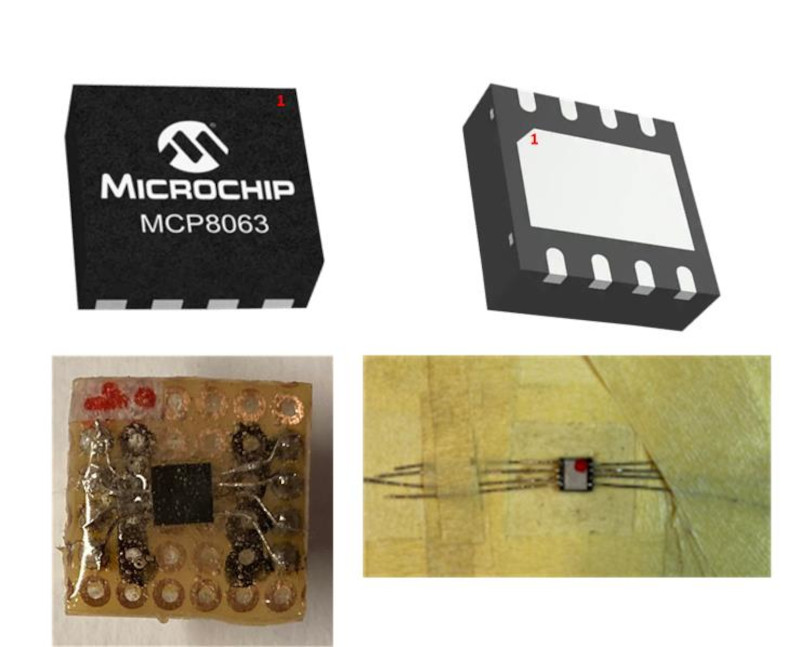
Es ist keine leichte Kost, den MCP8063 mit acht winzigen Anschlussdrähten zu versorgen!
Zusätzlich zur Lötstation brauchst du eine
Lupe.
Aber es geht, mit viel Zeit und Geduld schafft man es, einen Adapter zu bauen.