Ein Schrittmotor ist eine besondere Form des Gleichstrommotors. Wie aus der Bezeichnung bereits abzuleiten ist,
lässt sich ein Schrittmotor in einzelnen Schritten ansteuern. Das hat einen großen Vorteil,
wenn man genaue Positionen anfahren muss. In diesem Experiment zeige ich,
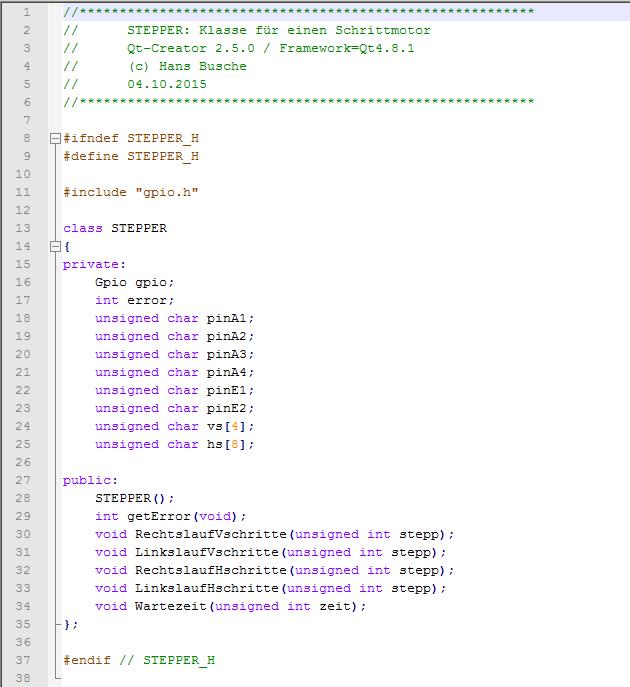
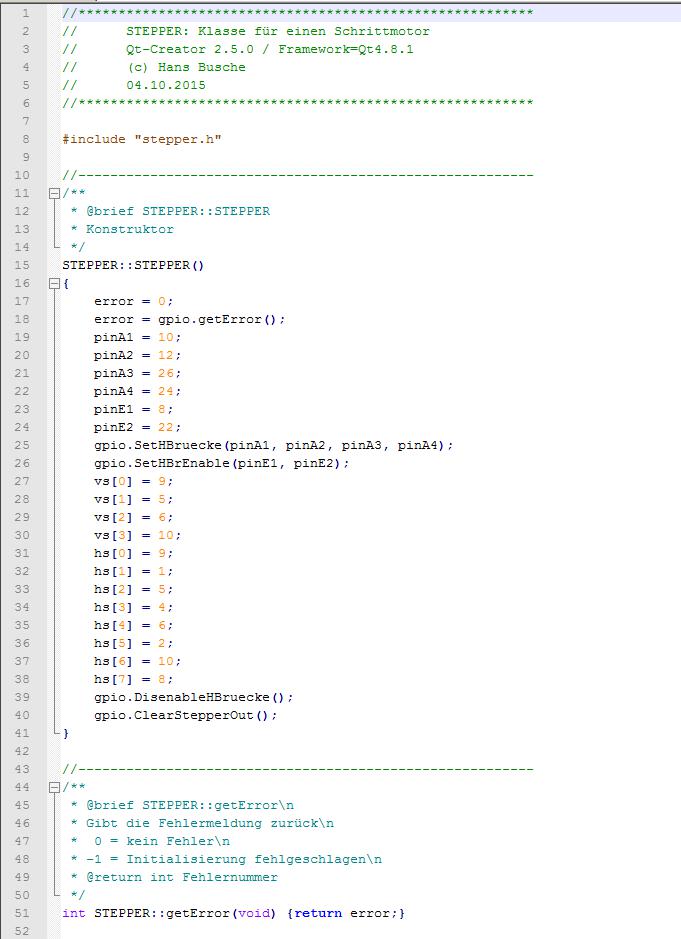
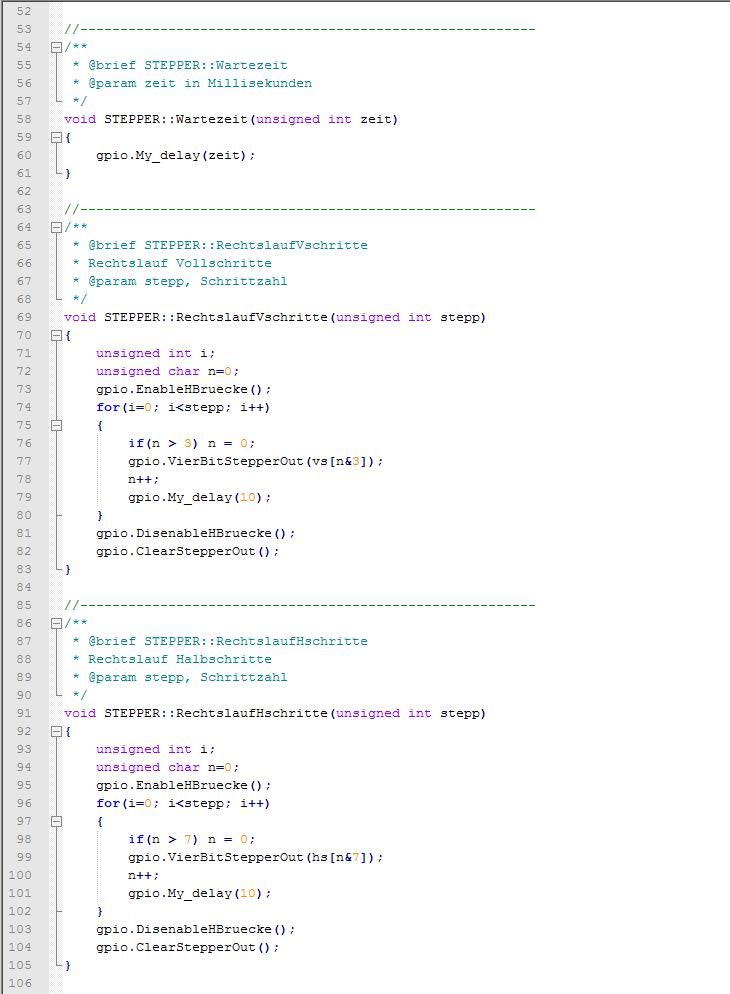
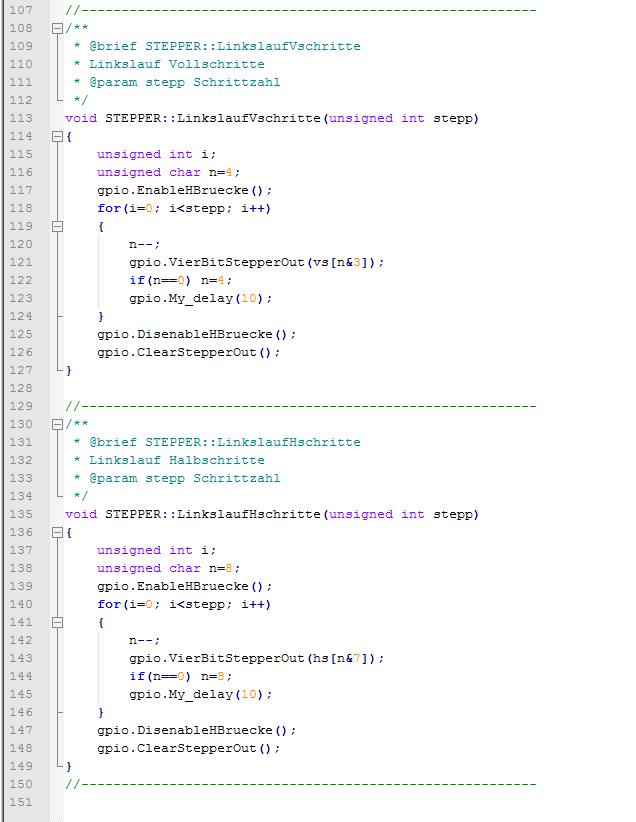
wie man so einen Schrittmotor mit dem Raspberry Pi steuert.
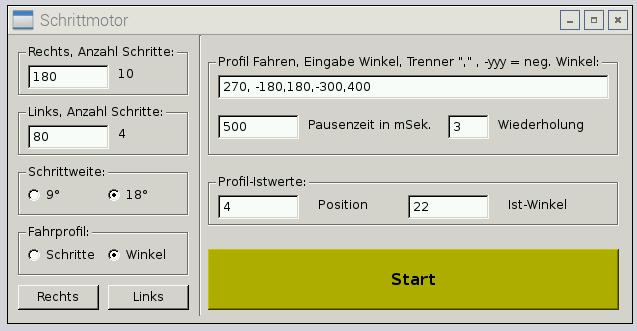
Funktionen: Voll- oder Halbschritte. Positionierung in Abhängigkeit der Schrittzahl oder Winkel.
Weiterhin kann ein Fahrprofil eingegeben werden. Man gibt in einem Editierfeld kommagetrennte Zahlen ein.
Diese werden als Winkel interpretiert. Positiv Werte (ohne Pluszeichen) entsprechen Drehrichtungen im
Uhrzeigersinn und Werte mit Minusvorzeichen entsprechen Drehrichtungen gegen den Uhrzeigersinn.
Zwischen den einzelnen Fahrpositionen kann eine Pausenzeit in Millisekunden definiert werden.
Weiterhin besteht die Möglichkeit einen Wiederholungszähler zu aktivieren. Hunderte von
kommagetrennte Winkel können eingegeben werden. Der Button „Start“ wird erst zur Betätigung
freigegeben, wenn die Werte in der Editorzeile „Profil Fahren“ syntaktisch korrekt sind.
Im obigen Bild werden 5 Positionen mit einer Pausenzeit von 0,5 Sekunden angefahren und dieser
Fahrprozess wird dreimal wiederholt.